
오래된 그리고 어디론가 숨어버린 핸드콘트롤러를 기다리는 스텝모터용 적도의가,
자신을 돌려줄 콘트롤로를 만나는것을 기대하니 기분 좋습니다.
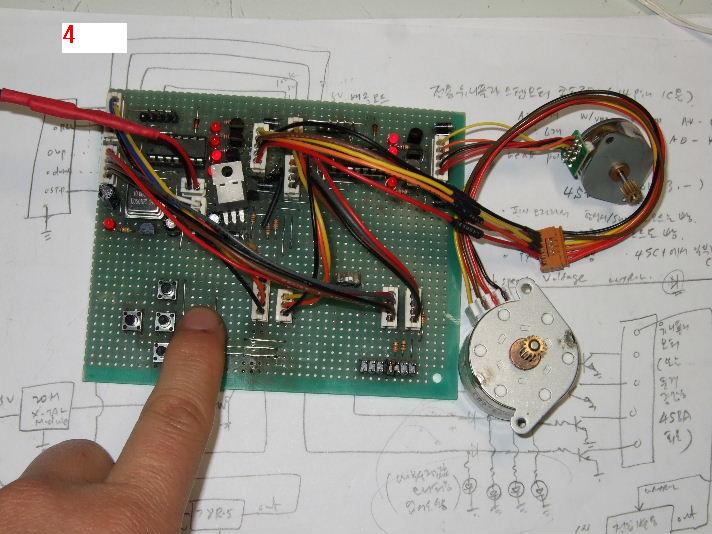
오늘 새벽에, 그동안 진행하던 범용 유니폴러 스텝모더 구동장치의 시험을 대충 마무리했습니다.
제가 뭐를 똑같이 카피하는 성질이 아니라서 이 기능을 보면 잘 이해가 안될수 있을겁니다.
이와 같은 기능이 있는 상용 장비를 보신분이 제게 코멘트를 하시면 1착으로 드리지요^^
1.이장치는 유니폴러 스텝모터가 장착된 한정된 적도의에 해당되며 1개의 장치에서 한정된 적도의 모두를 선택할수 있습니다.
(한정된 적도의란, 많이 보급된 8개의 서로다른 적도의의 data를 미리 넣은것입니다)
2.최소한의 부품과 구하기 쉬운 부품(마이콤등 프로그램하는 것은 어떻게 할수 없고)을 사용했으며,
3.저속과 고속에서 서로 다른 전압을 자동으로 모터에 공급합니다.
4.최소한의 부품을 사용하기로 했기에, 필요한 정보의 표시는 다소 복잡합니다만, 현재의 상태가 어떤 기종용인지,
다른 기종으로 셋팅을 하려면 어떻게 확인해야 하는지를 표시확인할수있습니다. 또 이상동작을 할때에
모터가 문제인지, 마이콤이 문제인지, 연결부위가 문제인지 비교적 쉽게 눈으로 확인할수 있습니다.
5.적경용 마이콤과 적위용 마이콤은 같은 프로그램이라서 2축용에서 적경축등 중요한 축이 고장날때에 응급조치가 됩니다.
6.2축용으로 써도 되고, 1측용으로 써도 됩니다. 1축용으로 사용하면 적위쪽 회로에 부품을 꼽지않으면 됩니다.
기능을 간단히 설명하면(특이사항 중심)
전원을 켜면 4개의 불이 깜빡이며, 모터가 돕니다.
모타배속스위치를 고속모드로 전환해도 항성시이며 저전압(항성시 전압)으로 모터가 돕니다.
(상용제품은 항성시때는 보통 12v->5v 기계적스위치로 전환함)
앞,정지,뒤 버튼을 누르면 해당 속도모드로 돌며, 고속에서는 모터공급전압이 자동으로 올라갑니다(12v 입력때)
내 장치가 어떤 기종용인지 확인하려면 뒤/아래버튼을 누른상태에서 전원을 투입하면 4개의 불이 2진수 값을 표시합니다.
내 장치를 다른 기종용으로 바꾸려면, 속도전환스위치를 특정위치(정속위치는 기종1로 배당, 2배속위치는 기종 2로 배당,,, 8까지)
로 놓은 상태에서 전후좌우버튼 등의 순서에 따른 조작으로 4개의 불을 보며 선택하며, 그 값은 저장되어 다음번 전원투입때는
변경된 기종용으로 됩니다.
오늘 새벽에 위의 기능을 구현(표현,불러옴,새로 저장함등등)해서 기분이 좋습니다.
이제는 8개의 기종을 선정하며, 각 기종당 항성시에서 어떤 시간지연(스텝모터는 이것이 생명)값인지, 또 배속은 어떤것들이
있는지 자료를 찾아서 넣어야 합니다.
-
4월4일 1시쯤 추가 == low data 모으는 중(4월4일-A)
data를 모으고 있습니다
8기종의 의미는 향후 적도의 모델로 나누지 않고, 핸드 콘트롤러 호환으로 나눌겁니다
P2Z - 1축 ; 입력전압은 6V,
모터;12v/70오옴/유니폴러24스텝,감속비(아래 참조),2배속,FULL/HALF STEP 미확인,UCN2004 스위칭
EM200B - 2축 ; 입력전압은 12V
1축;모터;12V/70오옴/유니폴러24스텝,감속비(아직 확인 안함),가변셋팅고배속1개,TD62084 스위칭
2축;모터;12V/70오옴/유니폴러24스텝,감속비(아직 확인 안함),가변셋팅고배속1개,TD62084 스위칭
EM2S - 1축 ; 입력전압은 6V,
모터-12v/70오옴/유니폴러24스텝,감속비(아래 참조),2배속,FULL STEP 구동. TA8415 스위칭
EM1/EM2 - 1축 ; 입력전압은 6V
모터-12v/70오옴/유니폴러24스텝,감속비(아래 참조),2배속, FULL/HALF STEP 미확인,TD62004 스위칭
베타프라즈마(QMD-TWIN) - 2축 ; 입력전압 12V
1축;모터- 아직 모름, 감속비 아직 모름, 2배속/8배속, FULL/HALF STEP 미확인, 2A TR(TMP4002) 스위칭
2축;모터- 아직 모름, 감속비 아직 모름, 2배속/8배속, FULL/HALF STEP 미확인, 2A TR(TMP4002) 스위칭
B(4월24일 추가 =====> 1배속의 펄스 주기는 199.45375msec(역산)이며, 모든 속도에서 full step 및 12v 펄스, 큰딘 5핀 5핀중 중앙핀이 공통, 모터저항 100오옴)
(5월13일 추가, 24스텝모터로 추정, --> 144웜은 1바퀴에 600초(10분)쯤 소요되었음, 1/500 감속을 감안하면 모터 1회전에 1.2초,
측정한 full step 주기 0.2초를 감안하면 1.2/0.2=6, 스텝수 4를 곱하면 24 스텝으로 추정함 - 모터에 스텝표기가 없음)
( 기어 감속비는 1/500, 웜기어는 144, 웜과 감속기의 연결용 평기어비는 31:31, 모터는 12v 사양)
MD-6 - 1축 ; 입력전압은 12V(9V)
모터- 아직모름, 감속비 아직 모름, 2배속/16배속, FULL/HALF STEP 미확인, TD62103 스위칭
D(5월13일 추가 ====> FULL STEP 구동함( 2 ON, 2 OFF) , 모든 배속에서 모터공급전압은 5V
모터저항은 20오옴, 8핀 큰딘 사용함, 48스텝, 1/120 감속비, 144웜기어
항성시때의 펄스주기는 415.52898 msec
SD-1 - 1축 ; 입력전압은 12V
모터 - 아직모름, 감속비 아직모름,큰딘 5핀또는 큰딘 8핀사용.
배속 스위치는 없이 +16배속/-16배속/+2배속 키. TA8415 스위칭
C(5월12일 추가 ====> HALF STEP 구동함( 3 ON, 5 OFF) , 모든 배속에서 모터공급전압은 5V
모터저항은 20오옴, 8핀 큰딘 사용함, 48스텝, 1/120 감속비, 144웜기어
항성시때의 펄스주기는 415.52898 msec
DMD-1 - 2축 ; 입력전압은 6V ==> 7v 이상 필요함 ==> 6v또는 7v, 최대 7.5v를 넘으면 안됨, 6v에서는 적위가 작옹 안될때도 있음
1축;모터 - 아직모름, 감속비 아직 모름, 큰딘 5핀 출력 2배속/8배속, TD62103 스위칭
2축;모터 - 아직모름, 감속비 아직 모름, 큰딘 5핀 출력 2배속/8배속, UCN4202 스위칭
CN(5월12일 추가 ====>FULL STEP 구동, SP적도의의 MT-1모터에 시용하는 것으로 되어있음(테스트 하지 않았음)
적경 = full step 의 2 phase 구동 (2 on, 2 off)
적위는 full step 의 1 phase 구동(1on, 3off).
모터구동 전압은 공급전압임.(역방향 보호다이오드를 거쳐서)
(5월13일 추가 1배속의 펄스 주기는 199.45375msec 로 추정됨,(5월15일 수정)
적경및 적위 모두 full step(적경은 2phase, 적위는 1phase)
(5월15일 추가, 166msec 근처로 추측됨(kenko betaplasma 에 연결하여 작동시켜보니 48/40 의 비율로 빠름
단위회전당 항성시 소요시간은 dmd-1 40초, qmd-twin 48초.
DMD-3 - 2축 ; 입력전압은 12V
1축;모터 - 아직모름, 감속비 아직 모름, 큰딘 5핀 출력 2배속/16배속, TD62103 스위칭
2축;모터 - 아직모름, 감속비 아직 모름, 큰딘 5핀 출력 2배속/16배속, UCN4202 스위칭
DD-1 - 2축 ; 입력전압은 12V
1축;모터 - 아직모름, 감속비 아직 모름, 큰딘 5핀 출력 1.5배속/2배속/1632(착오정정)배속, TA8415 스위칭
2축;모터 - 아직모름, 감속비 아직 모름, 큰딘 5핀 출력 1.5배속/2배속/1632(착오정정)배속, TD62103/TA8415 스위칭
C(5월12일 추가 ====> HALF STEP 구동함( 3 ON, 5 OFF) , 저배속 위치에서 모터공급전압은 5V,
32배속 위치에서는 12v 공급(32배속 위치에서의 항성시 구동때도 12v공급)
모터저항은 20오옴, 8핀 큰딘 사용함, 48스텝, 1/120 감속비, 144웜기어
항성시때의 펄스주기는 415.52898 msec
NES - 1축 ㅣ입력전압은 12V
모터 - 아직모름, 감속비 아직모름,큰딘 5핀사용.
2배속/8배속. BA12004 스위칭
제가 예전에 조사한 자료
2012.1.30일
EM1/EM2/EM2S/P2Z의 기어비는 모두 같으며, 인가되는 펄스는 같습니다
(항성시 펄스의 주기는 79.7815MSEC, 1스텝당 펄스주기는 80/4=19.945MSEC)
2012,1,31일
EM1(1983발매),EM1S(1989발매),EM2(1994발매,),EM2S(핸드콘트롤러변경)
-
2012년 5월12일 추가
빅센 dd-2(dd-1과 동일)과 sd-1의 모터구동 펄스를 오실로스코프로 보고, 모터를 열버봤습니다.
모터는 48스텝이며 20오옴/phase, 1/120의 감속비가 부착되어있으며, 빅센 gp와 gpd에는 적경 적위 모두 웜기어 144개가 있습니다.
콘트롤러(위의 두기종 같음)의 스텝모터 구동방법은 모든 배속에서 하프스텝이며(3 on,5 off) 항성시때의 주기는
아날로그 오실로스코프로 대충 봤을때 320msec입니다.(아날로그 스코프는 낮은 주파수에서는 정략적인 값에 오차가 많습니다.)
웜기어와 감속비등의 자료로 역산하면, 항성시때의 모터에 인가되는 주기는,
1 항성일 = 86164.08984 초 / 144 = 598.361735 초 / 120 = 4.98634779 초 / 12(48스텝이기때문에 48/4 = 12) = 0.41552898 초 = 415.52898 msec
입니다. 하프스텝모드로 구동하므로(3on, 5on) 8로 나누면 51.9411msec 의 펄스가 필요하네요.
빅센dmd-1은
적경과 적위의 구동펄스가 다릅니다.
적경은 full step 주기 약 170 msec 로 오실로스코프로 봤습니다. 8배속에서 약 22msec , 6v전원입력에서도 모터구동 됩니다.
적위는 full step 의 1phase(1on,3off) 이며 8배속에서 약 20.77msec(48.135hz)이며 1배속으로 환산하면 166.2msec 정도입니다.
적위는 입력전압이 6v 이면 안 돕니다(7v정도 필요, 7.5v 이상에서는 또 다른 문제가 생김니다)
큰 딘 5핀이며 12방향이 공통+입니다.
sp 적도의의 기어비와 mt-1 모터의 내용을 알아야 정확한 항성시 구동펄스값을 알수 있습니다
(5월13일 추가 1배속의 펄스 주기는 199.45375msec 로 추정됨, 모터는 24스텝의 1/500 감속비의 모터가 사용되는 것으로
연산해 봅니다. 겜토 베타프라즈마의 144웜 및 1/500 + 24스텝모터와 같은 것으로 판단됨)
빅센 md-6는 큰딘 8핀으로 추정됩니다(모터선은 6개, dd-1 과 배선구조가 같음
1축만 있고, 모든배속에서 5v전압이 모터에 공급됩니다.
full step 이며(2on, 2off) 항성시 주기는 dd-1과 같아 보입니다.
dd-1용 모터를 물려서 (144기어를 감암) 항성시 구동(하루 방치)이 되는가를 보면 구동펄스를 확정할수 있습니다.
(5월17일 추가, 모터선이 6개이나 큰딘으로 5핀용인지 8핀용인지는 미확인)
-
5월13일 추가
MD-6 모터구동 TEST OK, MT-2?(1/120 감속비의 48스텝모터)에 MD-6연결해서 10분에 한바퀴돔
MD-6와 MT-2 + 144웜의 조합에서는 MD-6 + MT-2 에서는 10분에 1바퀴돌면 맞는 조합임)
-
5월15일 추가
겐코 베타프라즈마 적도의에 dmd-1을 연결해서 구동시켰습니다.
dmd-1(빅센)과 qmd-twin(겐코) 는 큰딘 5핀 출력이지만, 호환은 안됩니다. 5핀중에서 양쪽(9시와 3시방향)을 교환해야
돕니다. dmd-1을 연결했을때 모터가 빨리돕니다(단위회전수를 dmd-1은 40초소요, qmd-twin 은 48초, 알려진 qmd-twin 의
data(웜기어등등)를 기준으로 dmd-1의 항성시 주기는 약 166msec (정확한 값은 dmd-1 호환되는적도의에서 파악함)입니다.
-
5월17일 추가
dd-2 는 dd-1과 기능이 같으나(내부 회로 자세히 보지 않았음) 출력ic와 모터사이에 2오옴(1/2watt) 삽입되어 있음(8개)
dd-3는 오토가이더 포트가 있는 것만 암.(실물은 못봄)
-
5월22일 추가
em10의 모터 인가 펄스는 25pps 로 되어있는 자료가 있습니다. ( Astrophotography by T.Yoshida ) 25pps 는 1/25 sec 이며
40msec 가 됩니다. ( 참고로 제가 확인/측정한 em2s는 20msec입니다.) , 이강순님의 자료에 있는 EM200 의DATA 가 50PPS
인데 이것은 1/50 = 20MSEC가 됩니다. 즉 EM200의 모터와 EM2S의 모터는 같은 속도로 돈다는 겁니다.
yoshida 님의 자료에는 빅센의 GP2/GPD2 의 적경과 적위 기어는 모두 144 이며, SX/SXD/NEW 아트락스 의 적경과 적위기어는
180입니다.
em10 의 기어와 모터를 게산했습니다. 웜144, 평기어 감속비 45/36 , 감속기어 감속비 250, 24스텝 모터의 자료로 계산하면
86164.08984 / 144 / 45 x 36 / 250 / 24 = 79.78156466 msec 의 full step 펄스로 계산됩니다.
하프스텝으로 em10 적경이 돈다면 /2 = 39.890782 msec 으로 계산되고요 ( 적위는 2 phase full step 구동인데 적경은 미확인)
-
2013년 2월19일 추가
sp용 모터와 sp구동용 md5 확인했습니다.
md5는 5핀 큰딘 full step 약160msec 주기로, 48스텝+300 감속비의 기어모터(코일저항 100옴)에 연결됩니다. sp의 웜은 144.
 허 참. +1
허 참. +1