
어제와 오늘 제가 펼친 놀이는 미드의 초저가 구형모델의 중고부품을 이용한 적경-적위 값 표시장치입니다.
미드 오토스타, 셀레스트론 넥스타, 스카이워쳐 신스켄을 비롯한 컴퓨터내장 콘트롤롤러는 현재의 적경-적위 값을
표시합니다. 경위대건 적도의건 망원경이라면 어느곳을 향하고 있는지 적경-적위의 숫자표시는 꼭 필요하겠지요
컴퓨터내장 콘트로러에서 얼라인의 의미는 천구좌표와 망원경의 구면좌표의 오차를 보정하는 일입니다.
저는 이 오차의 보정을 아직 시작도 못했기에 기성품을 이용해서 조금 편하게 제 망원경에 쉽게 적경-적위값을
표시하려고 합니다.
제 망원경은 경위대건, 적도의건 고정삭이건 이동식이건 두루두루 쓸수 있도록 검토하는 겁니다.
이미 많은 업체에서 십수년 전부터 엔코더를 부착한 적경-적위 표시값뿐 아니라 고투기능까지 나와들 있지요.
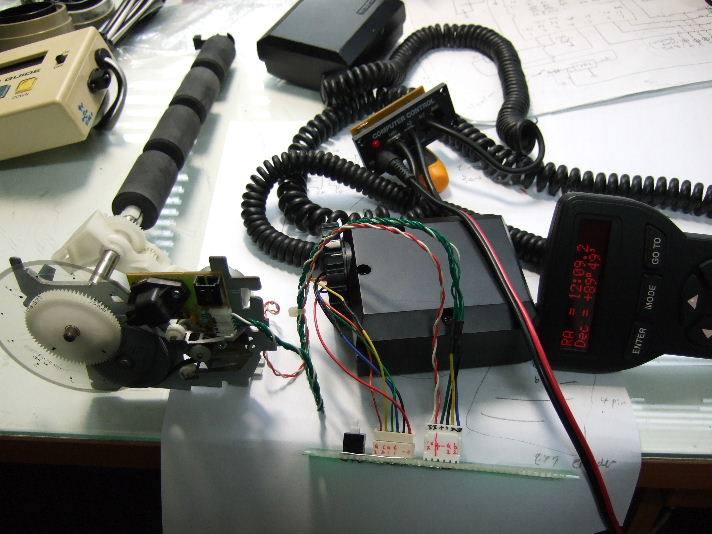
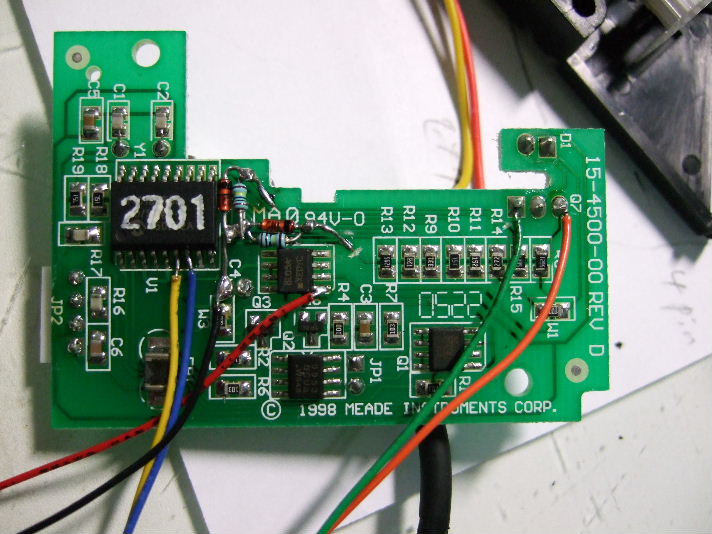
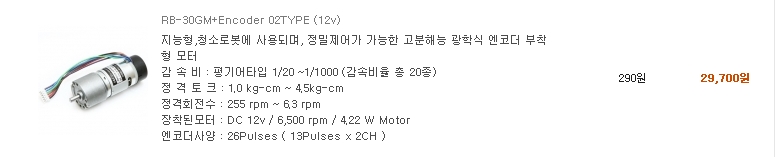
이글의 제일 앞줄에 있는 모토데로 약 6~7만원으로 내 망원경에 적경값과 적위값이 표시되는 장치를 개조해서 만드는 겁니다.
미드의 오토스타중에서 표시창이 있는 중고 콘트롤러 494 와 ds 모터용 기어박스 2개입니다.
저는 50불전후에서 이베이옥션으로 구했습니다.
오토스타는 경위대건 적도의건 스스로 모터를 돌리면서 엔코더의 입력값으로 얼라인을 완성합니다만,
모더(dc 모터)부착하는 것은 별도로 생각을 하기에 얼라인까지 속이던지 유사 얼라인방법을 만들던지 할것입니다.
얼라인의 단계를 생략하는 방법을 모색한 결과(오늘)는 적도의에서는 가능합니다.
(미드 오토스타 모터 기판의 내부 엔코더 입력쪽 선을 자른후 외부에 엔코더를 연결함으로 작업끝)
경위대에서는 꼭 얼라인을 해야 하기에 속일 방법을 찾아야 하고요.
테스트로 사용한(사진) 엔코더는 1회전당 1800 펄스가 나오는 분해한 프린터(스케너??)에서 나온것입니다.
적경이나 적위를 1800으로만 분해해도 12분(적위)의 분해능를 나타내네요.
이 엔코더를 적당히 망원경의 축에 부착시키고, 전원을 켜고 적경-적위 표시 모드로 전환하고, 알려진 밝의 별의
좌표가 되도록 망원경을 돌린후, 앤코더선을 잠깐 끊은후, 그별을 망원경에 집어 넣은후, 엔코더선을 연결하면
망원경 속의 별의 좌표는 오토스타 표시창에 실시간으로 표시됩니다.
사진의 왼쪽 위의 사각박스는 빅센 적도의에 부착하는 적경-적의 표시기인 스텔라가이드입니다.(엔코더 값을 수정할수 없나 봅니다 --> 19시56분 정정(수정할수 있네요 . 2개의 축을 1과 2로 구분하며 +- 1.0000 의 값을 2.0000 으로 바꿀수가 있습니다. 360도 회전을 720도로 인식, 항성시 추적여부를 선택할수도 있고요. 엔코더값이 안들어오면 적경값이 변하는 것이 정상이지요, 또 이 스텔라가이드는 경위대에서도 얼라인해서 쓸수도 있네요.... 여기에 그냥 우리 돕소니언 부착할까????)

-
4월20일 18시쯤 추가
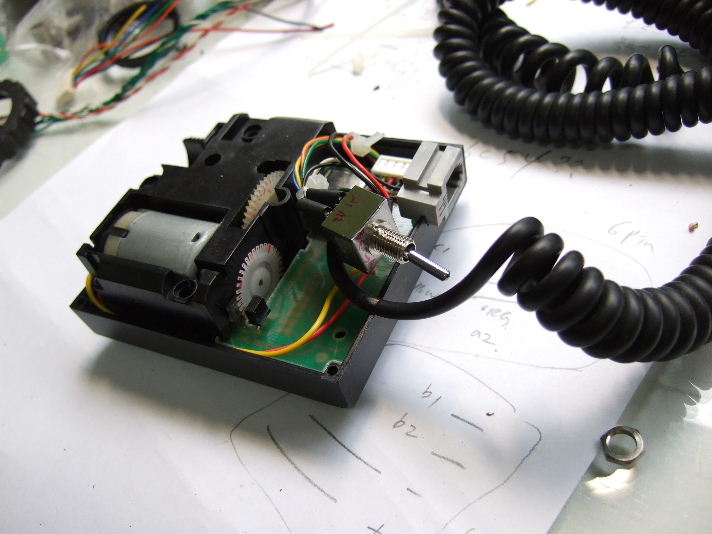
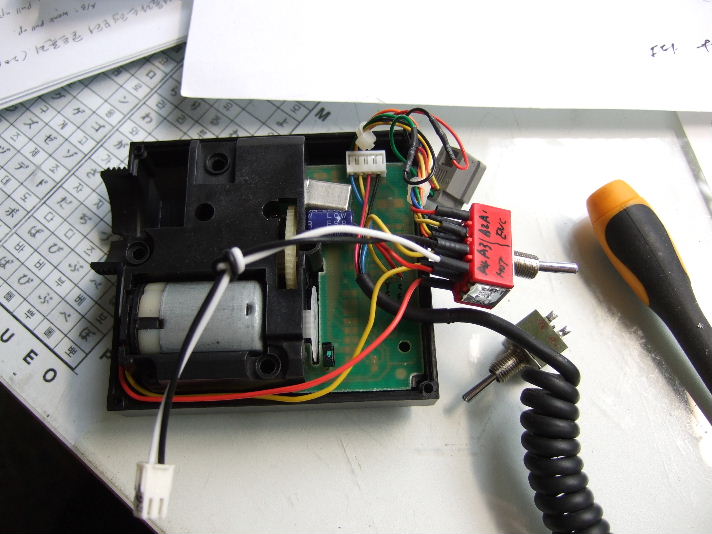
미드의 ds 모터 박스 주변의 선들을 깔끔하게 정리했습니다.
ds 모터 박스의 빈 공간에 내부/외부 엔코더 전환 스위치를 넣었고, 외부 엔코더 입력단자는 빅센 스텔라가이드의
엔코더 핀과 호환되도록 같은 핀규격으로 부착했습니다. 1개의 축만 이쁘게(지저분한 & 어수선한 티안나게),,
etx70의 ra ratio 값인 1.3어쩌구를 0.0023로 바꾸니까 대충 스텔라가이드의 엔코더(약 2880 분해능으로 추정)의
적경값에 근사합니다. 정확한 값은 나머지 한쪽도 이쁘게 정리한후에 계산해서 값을 적도롤 하겠습니다.


-
21시30분 추가
나머지 1개의 축도 개조했습니다.
왼쪽아래의 원형 링은 축에 끼워 놓는 빅센 gp용 엔코더입니다.
오토스타에서 기어 rate 를 2축 모두 변경(약 0.0023) 하고 손으로 두축을 돌려보니 한바퀴 돌면 아까 그 표시값을 표시합니다.
ㅎㅎㅎㅎㅎㅎㅎㅎ.
경위대용은 조금더 생각(오토스타를 더 눌러보고, 들춰보고,,,) 해야 합니다.
경위대로 설정하고 두 축을 돌려보면 경위대보드에서도 표시가 변경되는데(적도의 모드후 경위대 모드로 바꾸었을때)
오차를 검증하기에는 다소 시간이 걸릴것으로 생각되며, 얼라인과정을 완전 수평값을 디폴르로 삼고 있는거시 같기도 합니다.


-
4월21일 9시15분 추가
지난달에 이베이에서 건진 것입니다.
위의 용도로 활용된 겁니다.
-
4월21일 12시30분 추가
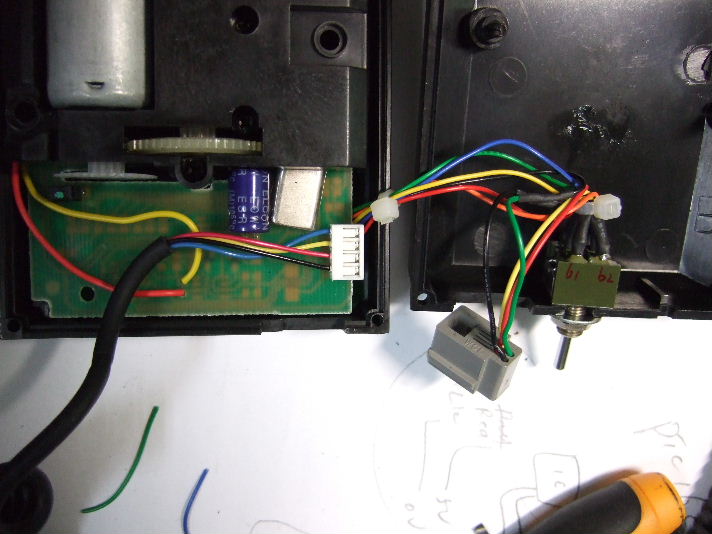
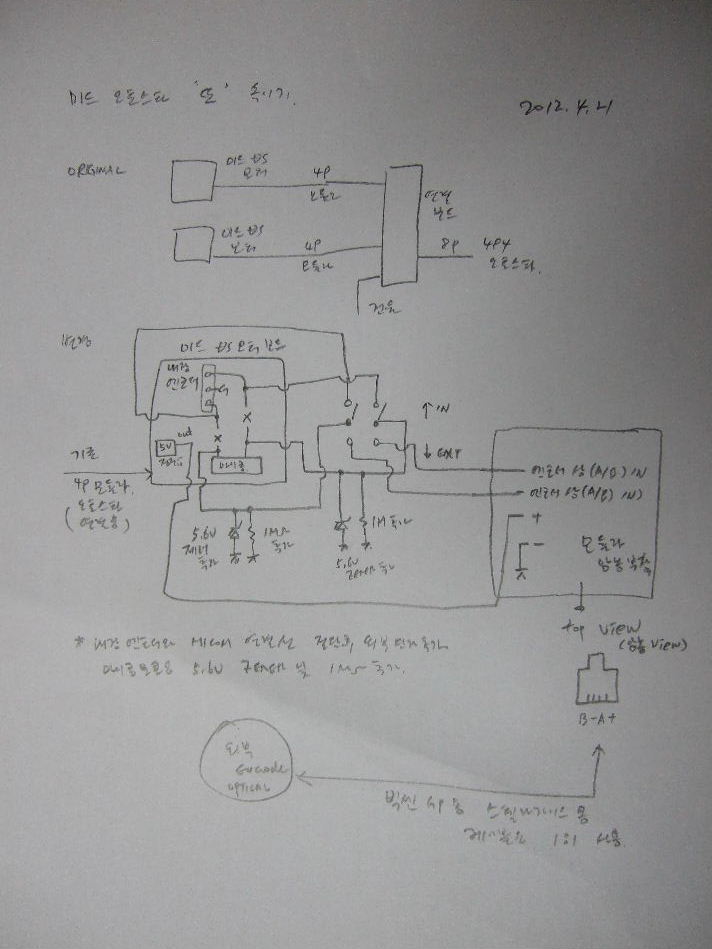
참조 회로도와 기판 개조부분 입니다. 기판은 2곳의 구리배선을 짤랐습니다.
경위대 모드에서도 양축을 1회전 시켜보니 회전전의 수치와 비슷하게 나옵니다. 즉 작동된다는 겁니다^^
경위대에서는 설치때에 수평을 잘 유지하는 것이 관건으로 보입니다.
빨리 회전시의 오류(저도 이것때문에 별도의 엔코더 수집보드를 도시락만하게 만든적이 있엇습니다)여부는 주의를 기울이며
실전에서 확인해야 겠지요. 아직 어느 망원경(돕소니언??)에 부착할지는 정하지 않았습니다. 기계적인 추가 검토는 차근 차근 착착착...
실내 test는 끝 , 임시 포장 들어겁니다.
-
4월21일 16시40분쯤 추가
포장을 한후, 완전히 잊어먹었는데, 2년전에 제가 생각했던것이 떠올라서 다시 들쳐냅니다.
관측을 하면서 녹색 레이저 포인터가 하늘을 누볐었는데, 안시에 좌표없이 종이성도로 별빛과 눈마주치기를
하는 저로서도 레이저의 지시기능은 정말 좋은것이죠.
내 망원경은 그냥 쓰면서, 옆에는 아주 작은 고투 레이져포인터 있어서, 고투 레이저로 내가 찾아갈곳을 비쳐주면
큰 망원경을 그 쪽으로 들이대면 좋을거라 생각을 했습니다. 고투 레이저포인터는 아주 작은 망원경(레이저 포인터)만
올리니까 손바닥 크기만 되면 되는 거고요.
손바닥 만한 망원경은 별통 사무실에 있는 것을 십여년 전부터 봤습니다. 그냥 교육용이랄까 폼 이랄까... 별통에서
만드거라면 그렇게 엉성하진 않을테고, 아마 이강순님이 취미생활하면서 어디서 주워 왔었겠지요,
제가 달라고 했는지, 그냥 저를 줬는지 아무튼 제손에 있은지 2년정도 됩니다. 2년 동안 방치된것을 보면 제가 달라고
한것은 아닌것 같습니다.
고투 레이저와 손바닥 적도의가 30분전에 제 머리에서 튀어 나옵니다.
아! 내 행동은 잠재의식의 지배를 받는가????
내 머리속에 잠시 박혀있던 지난 고투 레이저와 손바닥적도의가 미드 오토스타의 개조를 유도한것인가??
정말 기쁩니다.


-
4월23일 15시반쯤 추가
엇그제는 위의 고투 레이저포인트를 만들려고 했는데, 기어 등읃이 많이 필요해서 일단 옆으로 밀어놓고,
눈에 보이는 제 카톤 경위대(이번에 웜 기어이빨수를 조사 했습니다. 분해하지 않고 돌려보니 180개의 나사산이 있습니다. - 수평,수직 동일.
제가 가진 엔코더(제 겐코 베타프라즈마 적도의에 제가 15년동안 붙여놓았던 겁니다)를 이 카톤 경위대에 부착시켰습니다.
1회전에 500개의 분해능을 가지니까 500 X 180 = 90000분해능/축1회전시 이니까 90000/360도 = 250/1도 = 4.17/1분 = 14.4초의 분해능으로
적경-적위를 표시하며 따라갈수 있는 거로 계산됩니다.
엇그제까지 개조했던 미드 DS기어박스에 DC모터선도 전환해서 쓸수있도록 스위치를 접점수가 큰거(2개->4개)로 바꾸었습니다.
내부의 엔코더대신 내/외부 엔코더를 선택할수 있고, 내부의 모터대신 내/외부의 모터를 선택할수 있는 구조가 된겁니다.
적당한 비율의 감속기가 달린 DC모터를 오늘 오전에 구입해서 방금 1개의 축만 돌렸습니다. 어젠 90분동안 경위대 웜샤프트와
모터와 엔코더를 연결할 커플링을 CNC로 깎았구요. 모터와 엔코더를 고정시킬 부라켓트를 만들어서 달면 됩니다.
적당한 비율의 감속기의 기어비를 오차없이 구동하며, 기존 콘트롤러에 무리를 주지않으면서 최고속도와 항성시 정밀도를
갖추는 포인트를 찾으려면 조금 더 다듬고 테스트를 해야합니다만, 미드의 오토스타를 두루 두루 속이는 당초 목적은 달성했습니다.



-
4월24일 14시 추가
1개의 축에 부착한 기어드 모터와 엔코더를 고정시켰습니다.
180개의 웜기어와 500개의 엔코더 분해능에 대한 오토스타의 ra ratio와 dec ratio 값도 계산해서 조립한 한쪽축에
입력해서 구동시켰습니다
추적과 고투, 적도의/경위대 모드 모두 잘 됩니다(1개의 축만 테스트 해도 되지요^^, 다른 한축은 내장 ds 모터로 구동).
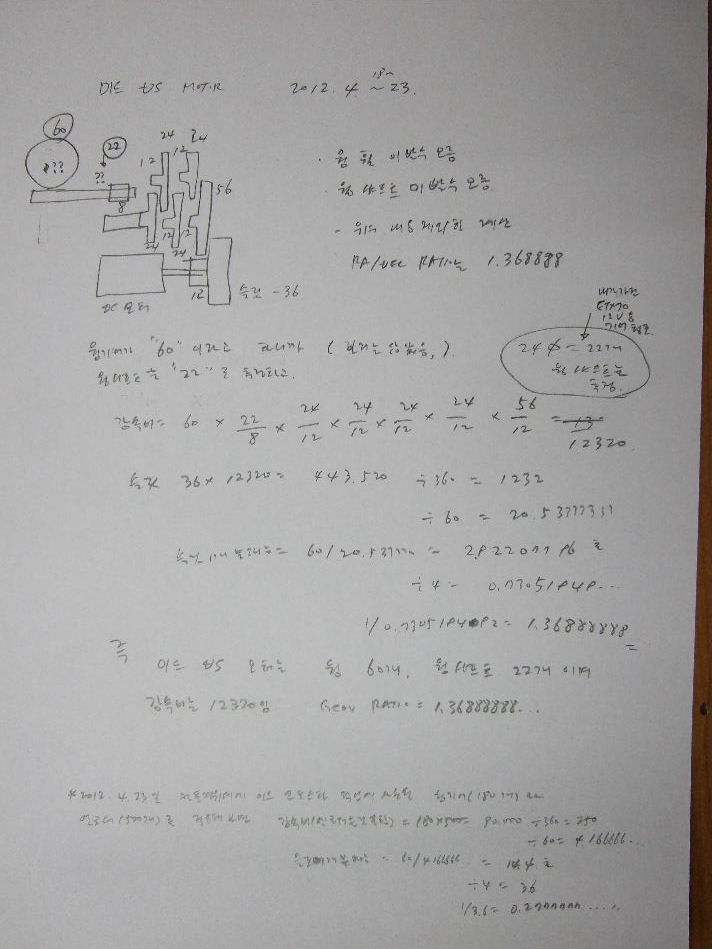
기어 ratio는 0.277777777 로 했습니다(기어드 모터의 감속비는 게산에 넣지 않습니다. 엔코더의 부착위치가 모터축이 아니라
기어드 감속된 모터의 축에 연결됭있기 때문입니다. 현재 52rpm 기어드 모터인데 속도가 높은 것을 구하고 있습니다.
2.77777 계산 과정은 180 x 500 = 90000 / 360 / 60 = 4.1666666,
슬릿1개 분해능 = 60/4.16666 = 14.2초 / 4 = 3.6, 1/3.6 = 0.277777777777777.
나머지 축에도 같은 작업을 해야합니다....


-
4월25일 22시 추가
나머지 1개의 축도 붙여 넣었습니다.
수평용은 ra ratio 0.277777777 로 넣고,
수직용은 dec ratio 7.22222222로 넣었습니다 "" ==> 오기정정. 7.2222222 --> 0.722222222 2012년 5월11일 1시40분"
사진의 수평용 모터와 엔코더는 모터는 120감속비이며 12v용 7500 rpm 이며, 8오옴에 무부하구동전류는 0.2A 정도이며,
엔코더는 감속기 이후에 부착한 500펄스/1회전입니다.
수직용 모터와 엔코더는 엔코더가 모터에 부착되어 있는 13펄스/1회전 마그네틱 엔코더이며 기어감속비는 100, 12V용 5400RPM
이며 6오옴에 무부하구동전류 0,.12 A 입니다. 마그네틱용 엔코더(홀센서)여서 외부에 풀업저항 2K 를 달았습니다.
500펄스 엔코더는 보유분이며, 120감속비의 모터는 12000원, 100감속비에 13펄스 엔코더부착 모터는 30000원 지불했습니다.
수평용의 구조도 수직용의 구조로 바꾸어야 정밀합니다(제간 만든거는 그냥 쓰지요, 백러쉬를 보정하려면 엔코더가 기어사이에
있으면 안됩니다.... 현재 수평용의 구조에는 180웜기어와 120 감속기 사이에 있어서 오차가 생기는 구조입니다.)
미드 오토스타와 연결하여 잘 따라갑니다... ㅎㅎㅎ


--
2012년 5월11일 1시44분 추가
수평과 수직 모두 100기어비의 12v 모터(내부저항 각각 5또는 6오옴9(ra35g 사용 ) 엔코더 13 펄스짜리로 넣었습니다.
기어 ratio는 두쪽모두 0.7222222 입니다.
 건축학개론...
건축학개론...