
금 십년 넘게 아주 작은 크기에 - 아주 큰 감속비를 가진 모터를 찿고 있었는데,
(발품 무지 팔았습니다 .기어 가공은 일찌감치 포기, 웜은 동축이 어렵고 특히 크기가 커지니 일찌감치 패스)
최대 1350, 그후로는 2400 정도에서 그 이상은 찾는 것을 포기 했고( 이보다 큰건은 현실적으로 쓸모가 없습니다 )
두개를 결합하는 최적의 조건을 찾고 있었습니다. 기어박스 단품으로는 상용품이 거의 없으니 기어박스와 모터가
붙어있는 조합에서는 외부로 나오는 출력측의 정보만 제공 되니까 내부의 모터가 어떤 모듈(모듈과 외경 모두 필수)
인가를 파악해야 하고, 그 모터를 들어내고 그 위치에 새로운 기어박스가 붙은 모터를 넣어야 하니 추가로 붙은 기어박스의
출력은 앞에서 떼어낸 모터에 붙어있는 같은 모듈과 외경인것을 골라야 했습니다. 이때의 모터는 dc가 아닌 스텝모터인것은
필수 이고요.
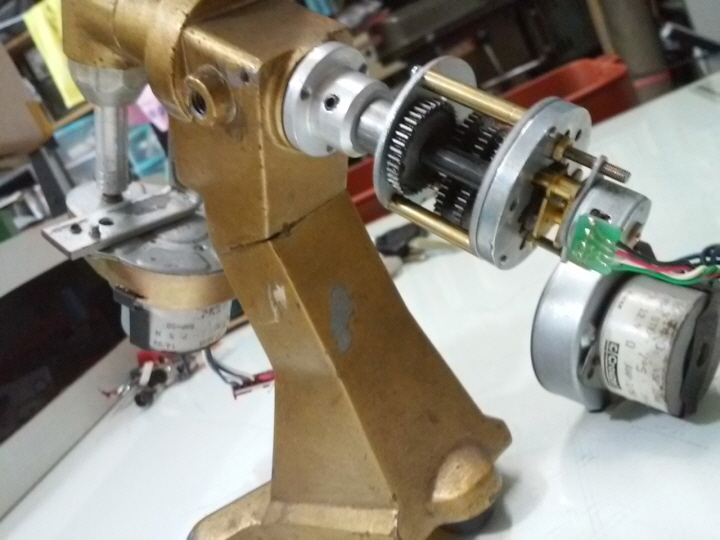
아무튼 두개의 모터와 두개의 감속기에서 모터 하나를 뺀 조합이 완성 되었습니다.
두 부분을 결합하는 부분은 작은 판재를 이용해서 자기자리에 쉽게 고정 할수 있습니다.
(기어박스와 모터에 고저용 홀이 있어서 적당한 중간 판재를 만들어 넣으면 됩니다)
360 도를 초로 나타내면 86,400 초 니까 312,200 의 감속비는 모터가 1초에 한바퀴를 돌아도 3.6pps 이니
모터 회전각이 30도라도 43 pps 나옵니다,ㅋㅋㅋㅋㅋ
ebay 주문한 모터 드란이브 모듈이 도작하면 요 작은 테이블 적도의에 부착해서 노트북 성도에 좌표가 표시되게
할겁니다(ek box 를 이용할것인데 엔코더를 안쓰고 제가 만들 핸드콘트롤러에서 가상의 엔코더 신호를 만들어서
ek box 에 전달 할겁니다. ek box는 노트북 의 천문 성도에 열결되는 거고요)



이 사진이 위의사진과 틀린부분은 ?? ㅎㅎㅎㅎ

-
9월13일 14시13분 추가
두개의 감속기를 결합(최종감속기에 붙어있었던 모터연결판에 사각형 구멍을 만들어서 작은 스텝모터 감속기를 결합)해서
적경쪽에 부착 했습니다. 붕 떠있는 이 모터 뭉치를 본체에 부착해야 합니다.
 전압및 극성등 요약 L_SIGHTRON NANO TRACKER AS0001
전압및 극성등 요약 L_SIGHTRON NANO TRACKER AS0001