
김준호나 천망동(스코프메니아) 박수영님, 부천동 권기식님이면 쉽게 제가 기쁜 이유를 알테지만...... 아무튼 뭐냐면,
돕소니언같은 큰 경위대(작은것도 포함, 수동 적도의도 포함)에 부착해서 사용하는 적경-적위 표시용 장치에
관한 것입니다. 자동 고투 바로 직전의 전자장치에 해당합니다.
가대에 적경-적위 표시용 장치(스텔라 가이드 등등)를 부착하여 작동시키면 이 표시용 장치의 허용값보다
빨리 이동시키면 적경-적위 표시값에서 오차가 생깁니다.
제가 1달여전에 ngc-60 을 빨리 돌렸더니(1~2초에 한바퀴(360도)) 약 3~4도 정도의 오차가 생겼고,
좀 천천히(3~4초에 한바퀴)돌리니까 오차가 눈에 띄지 않았습니다.
지납 정관(가평)때 홍천에 보관된 장비를 가지를 가면서 내촌 천망동(스코프메니아) 관측소를 들렸더니
유준규님이 관측소를 거의 다 지으셨더군요, 엔코더 오차이야기를 했더니 알고 있다고 하시더군요
예전에 썽안 돕소니언을 만들때 아마도 적용한것으로 생각됩니다(물어 보지는 않았습니다)
이 글의 주제가 바로 이것입니다. 수동으로 갸대를 빠르게 돌려도 엔코더의 data값(여기서 엔코더의 값이란 적경-적위의
값을 정량적으로 정확히 표시하기 위한 가장 기초적인 전기신호 값입니다)을 잃지 않는 다면 얼마나 좋을까요.
1시간 반 전에 운전중에 아이디어거 떠올랐습니다. 이문제는 20년전에 제게 발생 되었고, 다른 복잡한 방법으로
한정된 영역에서 해결을 했었는데 '엔코더 딜레이'라는 방식(이 이름도 제가 1시간 반전에 지은 겁니다, 이런 용어및
비슷(동일)한 기술이 공개되었는 내 관심사가 많이는 아닙니다^^) 을 적용하면 해결된다는 겁니다.
원리를 간단히 설명하면 이렇습니다. 빨리 회전(이동)하는 엔코더의 값을 본체장비가 정확히 못읽어 내는 것을 방지;하기 위해서,
엔코더와 장치 사이에 완충용 장치를 부착하는 겁니다. 그 장치를 엔코더 딜레이라고 합시다.
본체장비가 1msec(1/1000초)로 변화하는 엔코더신호를 경계로 이보다 빨리 변화하면 오차가 생기고, 이보다 천천히 변화하면
오차가 안생긴다고 가정합시다. 엔코더가 1초동안에 1500개의 신호를 발생시키면 본체는 당연히 오차를 발생시킵니다.
엔코더 딜레이는 1초동안에 1500개의 신호를 받아서 2초에 걸쳐서 1500개의 신호를 본체에 전달합니다.
본체에서는 1초에 750개의 데이터가 수신되므로 오차가 발생이 안되는 것이죠.
실제로는 이런 문제가 눈에 살짝 띄입니다만 무시할수 있는 수준입니다.
즉 망원경을 수평위치에서 수직 위치로 급하게 올려새웠는데 수직으로 정지된 상태에서도 표시값이 바뀌고 잇다는 것입니다.
그사이 1~2초후에는 숫자가 정지하고요 전등불을 끈후에 램프가 아직 뜨거운것과 비슷하겠네요
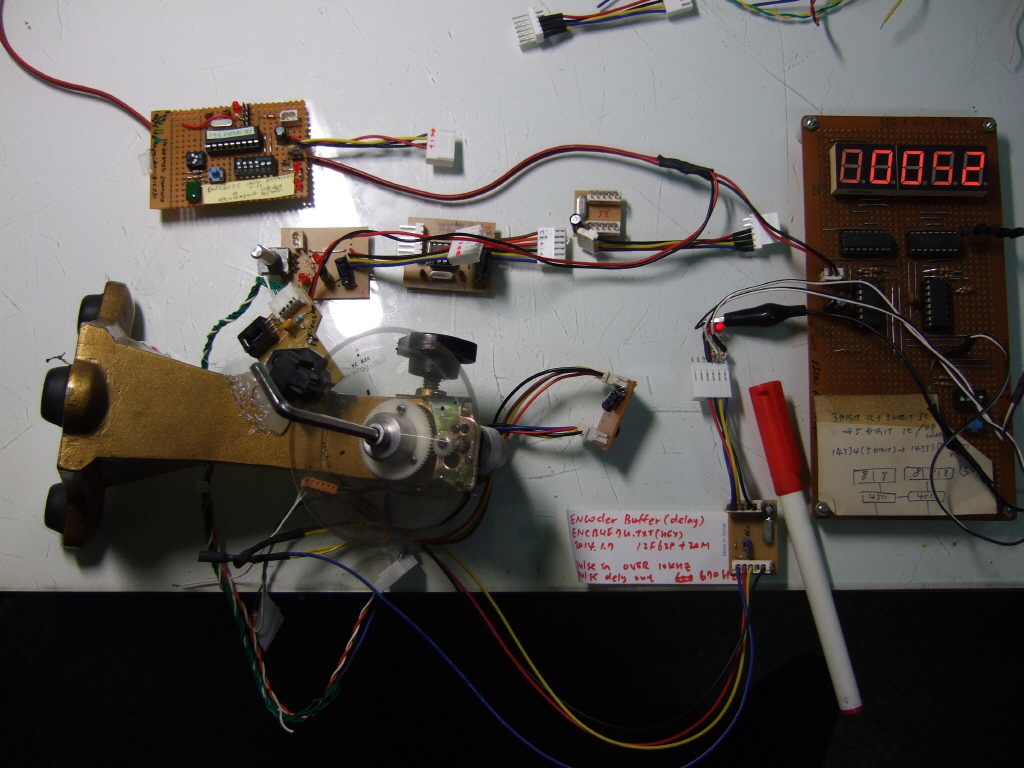
스타파티가 끝난후 이 방법을 사용하여 ngc-60 의 적경-적위 표시장치를 들어내서 우리 돕소니언에 부착 할겁니다.
2:3 기어비도 찾아 놨습니다. '2700 분해능/1회전 ' 의 엔코더가 필요한데 못구하니 프린터에서 뽑아낸 '1800 분해능/1회전'
회전 슬릿과 2:3 감속기어로 ngc-60 의 2700분해능을 속일수 있습니다.....
-
2014년 1월7일 추가
test 완료했습니다.
입력펄스는 10khz 이상, 펄스갯수는 8000개 근방까지, delay 출력은 약 670hz.
소스화일과 헥사화일 첨부합니다. encbuf7u.txt,hex
pic 12f629 사용
아주 간단한 디테일이 큰 차이를 만드는 실 예로군요!
짝짝짝! 참 잘했어요. ^.~