
< em2s,etx70.nexstar c11 포크,스타네비게이터 102,etx60),미드 ds.다까하시 em10,빅센gp,나노트랙커 AS0001, em-500 >
호기심으로 모터부착된 적도의나 경위대를 보면서,
어떤때는 기어의 지름, 또 이빨수를 세어 보기도 합니다.
또 맞물리는 기어의 규겯도 보게되고요, 다른 기종의 기어들을 결합해볼 엄두는 전혀없었고요.
또 스텝모터나 dc모터의 규격은 하나씩 따로따로 모아놓지만, 정리할 생각도 못했지요,
얼마전부터 각종 장비들의 기어 이빨수를 모아보고, 항성시와 배속에서의 전기신호를 모아보고 있습니다.
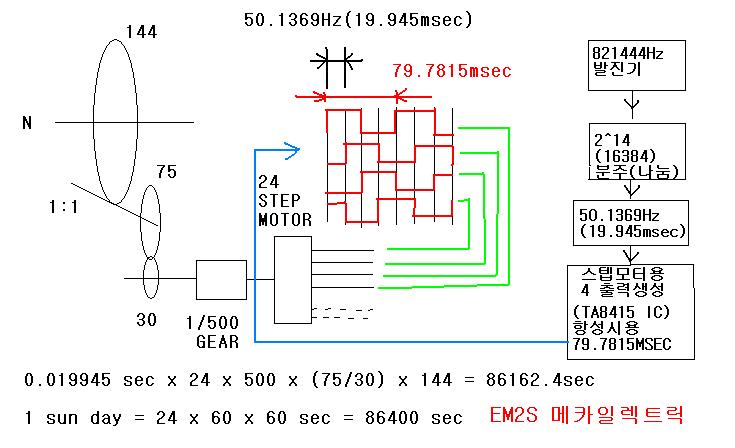
지난 금요일 오전엔. 특정 기종(em2s)을 처음부터 끝까지 정리를 시도 했습니다. (정관 준비로 마무리를 못하고 지금 했습니다)
처음이란 항성시를 위한 크리스탈 주파수 발진 이며,
마지막이란 하루에 1바퀴도는 적경축을 말합니다.
1번 의 주기가 0.00000121736초(821444hz) 인 크리스탈 발진기가 어떤 경로로 하루(항성1회전)와 연결되는지를 조사한 겁니다.
전기와 기계가 만나는 과정이라서 제목을 메카일렉트릭이라 했습니다. 기어의 규격을 보완이 필요하지만 깊게 들어가면 끝이 없지요
처음 data, 다까하시의 EM2S 입니다. 그림으로 정리했습니다.(사무실 PC에서 안 올라가면 저녁에 집에서 올리지요)
-
28일 21시23분 그림 추가합니다(em2s~.jpg)
--
--
2011년 12월15일 추가
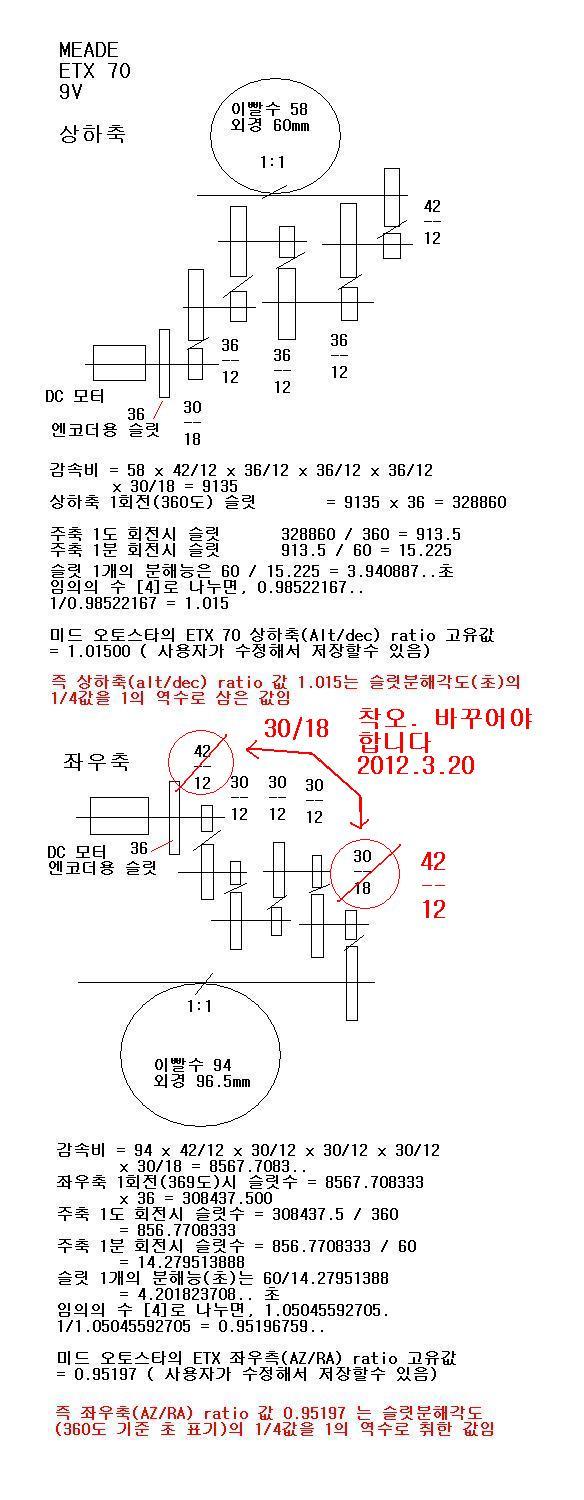
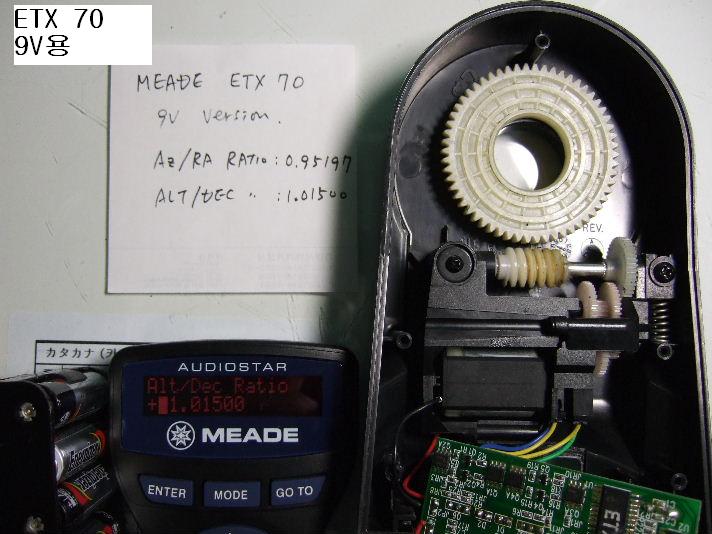
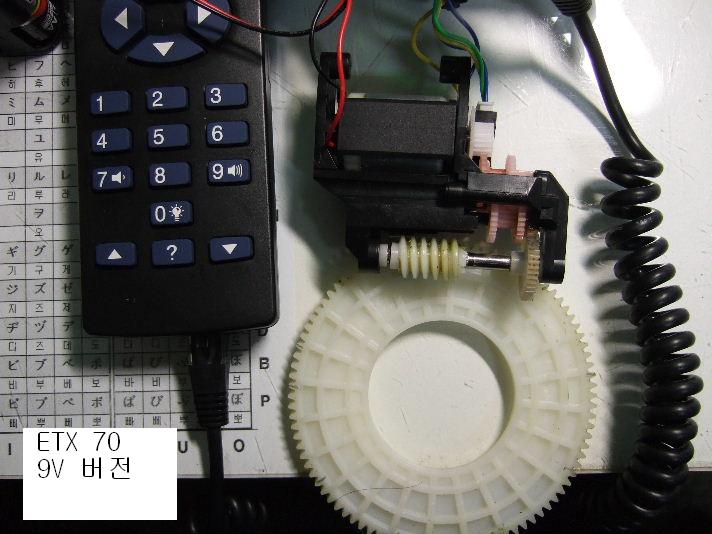
미드 ETX70입니다. ETX70은 직류모터이며, 모터의 회전수를 측정하는 엔코더라는 장치가 모터에 붙어 있습니다.

-
2011년 12월20일 추가
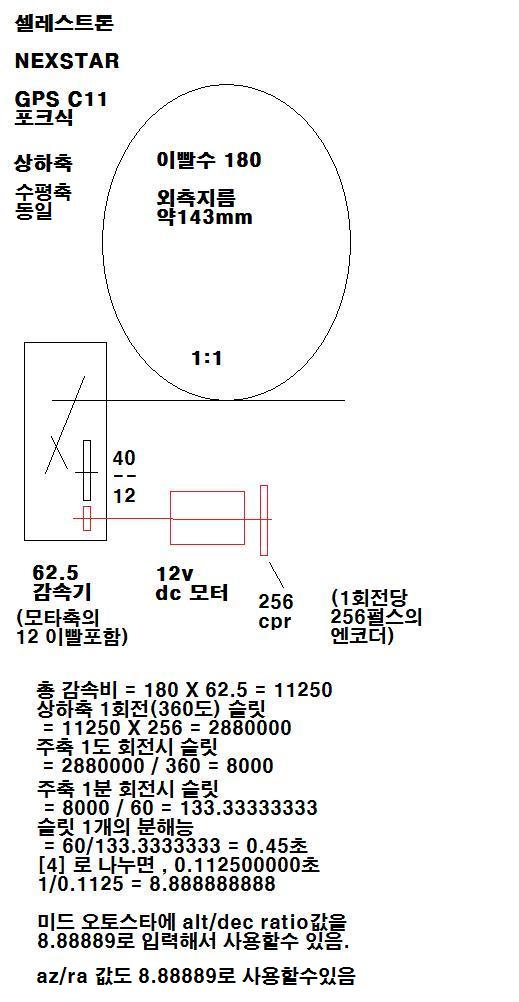
셀레스트론 GPS C11 포크식 상하이동축 웜기어수 = 180개, 외경은 약 143MM 구리재질,
감속기어박스는 미확인, DC모터는 12V, 모터축에 직결된 엔코더는 256 cpr.
-
23시에 상하축 기어비 그림포함 합니다. --> 21일 21시45분에 좌우측 포함된 그림으로 대체합니다.
(좌우축[수평축]의 기어박스의 거어비는 내부확인 못했습니다(분해안함), 360도 회전시켜 외부에서
점검하겠습니다. - 결과는 이곳에 기록하지요, 수직축의 기어비와 아마도 같은 것이라 생각합니다 21일씀)
---> 2012년 1월4일 추가, 기어박스의 기어비는 확인못했으나, 얼라인및 고투, 360회전시 같은 적경-적위값은
보이므로 위의 기어비와 같음을 확인하였습니다)
--
2012년 1월 5일 0시 33분 추가
위의 값에서 특정상수 "4" 의 이유를 알았습니다.
엔코더에는 A 상과 B상이 서로 곂치지 않게 진행되는데 회전시 A(LOW), B(LOW)-> A 변경->B변경->A회복->B회복의
4 STEP 이 반복되는데 엔코더의 슬릿수는 이 반복수를 표시하게 되니까, 한번 반복하는 동안에 4번의 상태변화가 일어나게
되고 따라서 4배의 분해성능을 낼수가 있는겁니다. 야호^^
-
2012년 1월9일 추가
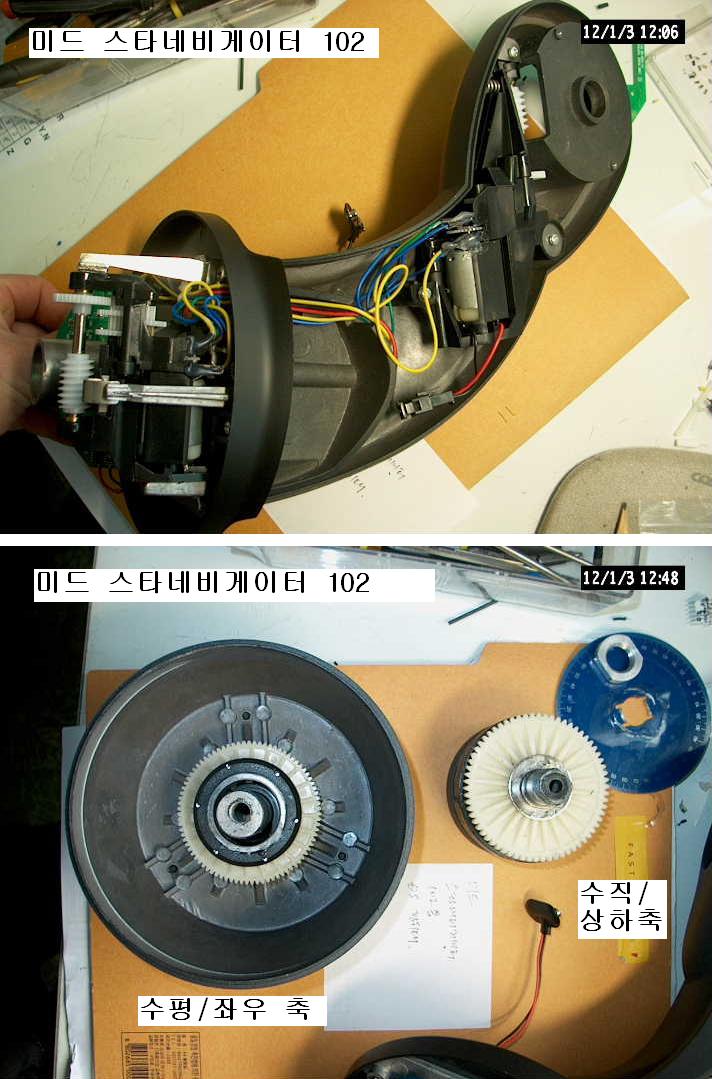
미드 starnavigator 102 의 기어를 분해하지 않고 바깥에서 이빨수를 셌습니다.
안쪽의 이빨수는 분해를 안해서 못했지만, 오토스타에 내장된 az/ra ratio와 alt/dec ratio 값을
역산해서 감속비를 추론했습니다.
etx70과는 최종 기어수만 차이가 납니다 (모터와 감속기에 사용된 기어들이 모두 같아 보입니다.)
102의 수평측 최종기어는 지름 약 69mm 정도이며 이빨수는 83개(etx70은 94개) 이며
(70/102의 큰이빨만의 비는 94/83 = 1.132 530 120 48 이며, 두 기종의 오토스타에 저장된
az/ra ratio 비는 0.95197/0.84057 = 1. 132 529 117 14 이며 두 값은 거의 같습니다.)
102의 수직축 최종기어는 지름 68.5mm 이며 이빨수는 66개(etx70은 58개)이며
(70/102의 큰이빨만의 비는 58/66 = 0.87 87 87 87 87 87 이며, 두기종의 오토스타에 저장된
alt/dec rario비는 1.0150 / 1.15500 = 0. 87 87 87 87 87 이며 두값은 같습니다.)
즉 수평측 감속비는 7565.1041 .. 이며 엔코더는 36슬릿입니다.
또 수직측 감속비는 10395 이며 엔코더는 36슬릿입니다.
사진첨부합니다(meade_starnavigator 102.jpg)
-
2012년 1월13일 추가
2011년 11월23일 기록한 오디오스타내의 az/ra, alt/dec ratio 를 복사합니다
"오디오스타 A255 버전에 있는 data [2012년1월16일 1줄 추가, AUDIOSTAR는 497EP A255. STATISTICS 에는 97.6K char Free A255버전]
(STARNAVIGATION 102/114/ DS2060/2070/2076/2080/2090/2102/2114/2130/DSX90)
AZ/RA RATIO = +0.84057
ALT/DEC RATIO = 1.15500
(EXT60/70/80)
AZ/RA RATIO = 0.95197
ALT/DEC RATIO = 1.01500 "
-
위의 etx70 data는 9v 버전입니다.
오늘 497 오토스타 43E 버전에 있는 RATIO값을 보는데, ETX70에서 차이가 납니다.
497 43E 번전에서는 ETX70의 AZ/RA RATIO 가 1.36889, ALT/DEC RATIO가 1.36889 로 ETX90과 같은 값이 나옵니다.
오토스타 497의 43E 버전에 있는 DATA [2012년1월16일 1줄 추가, STATISTICS 에는 38.8K char Free 43Ea 버전]
(ETX70/90/105/125_DS60/70/80/90/114/127)
AZ/RA RATIO = 1.36889
ALT/DEC RATIO = 1.36889
(ETX80)
AZ/RA RATIO = 0.95197
ALT/DEC RATIO = 1.01500
(LXD55/75계열 127AC/152AC/6NEW/8NEW/10NEW/8SC)
AZ/RA RATIO = -2.53715
ALT/DEC RATIO = +2.53715
오토스타 494(숫자 키패드가 없는 작은것, 495는 497과 모양이 같은데 내부 롬 크기가 작다고 함) 10 버전에 있는 DATA
(ETX70) [2012년 1월16일 한줄 추가, statistics 에는 5.2k char Free 1.0h 버전]
AZ/RA RATIO =0.95197
ALT/DEC RATIO = 1.01500
(DS60/70/80/90/114/127)
AZ/RA RATIO =1.36889
ALT/DEC RATIO = 1.35889
ETX60(9V)의 감속비, 최종 기어의 이빨수와 이빨지름은 9V 용 ETX70 과 동일합니다.
-
2012년 1월16일 추가
오토스타 497인지 495인지 오래된 버전의 기기속의 내용입니다.
495인지 497인지는 까봐서 프래쉬롬(ram 이라고 표기하는데 rom 이겠죠)의 용량을 봐야하겠죠.
아직 외부(디스플레이 메뉴에서)에서 구분하는 방법은 모릅니다.
497(495) 2.0버전에 있는 data
(ETX70EC) --> 2.0버전에는 ETX70 의 규격이 EC이네요(이전 글에서의 ETX70 과는 RATIO가 다르지요, EC는 12V용 같습니다)
AZ RATIO = 001.36888885 (AZ RATIO라고 표시됨, AZ/RA RATIO라고 표시되지 않음)
ALT RATIO = +01.36888885 (ALT RATIO라고 표시됨)
(DS60/70/80/114/127)
AZ RATIO = 001.36888885
ALT RATIO = +01.36888885
오토스타 메뉴에 있는 STATISTICS 에는 37.4K char Free 2.0G 버전이라고 있습니다.
-
1월16일 또 추가
오디오스타는 497EP 라고 하네요. 전원 투입시 표시창에 497EP 라고 뜹니다.(2달동안 EP 표시를 못봤네요^^)
-
2012년 1월30일 추가.
em2s용 4020은 항성용 클럭에서 2의 13제곱 분주하며, 2배속에서는 2의 12제곱 분주합니다. clock 입력은 821,444hz
p2z용 5526R은 항성용 클럭에서 2의 16제곱 분주하며, 2배속에서는 2의 15제곱 분주합니다. CLOCK 입력은 3,285,775hz
EM1/EM2용 5036은 항성용 클럭에서 2의 16제곱 분주하며, 2배속에서는 2의 15제곱 분주합니다. CLOCK입력은 3,285,770hz
5562와 5036은 4013을 거쳐가면서 1/2로 분주되니까 EM2S와 "P2Z/EM1.2" 와는 2의 2제곱인 4배 차이가 나며,
이 차이는 입력 클럭주파수 차이(3,285,775/821,444 = 4) 와 같네요.
즉 모터에 인가되는 펄스는 같으며(항성시 펄스의 주기는 79.7815MSEC, 1스텝당 펄스주기는 80/4=19.945MSEC)
EM1/EM2/EM2S/P2Z의 기어비는 모두 같게되네요.
-
2012년 3월20일 추가
etx70 수평축 기어 배치의 순서하나를 잘못 기록하였네요. 붉은색이 맞으며, 수평과 수직축 의 기어차이는
기어내부의 36 이빨과 30이빨의 차이입니다. 수평과 수직은 내부기어의 축간 간격이 다릅니다.
-
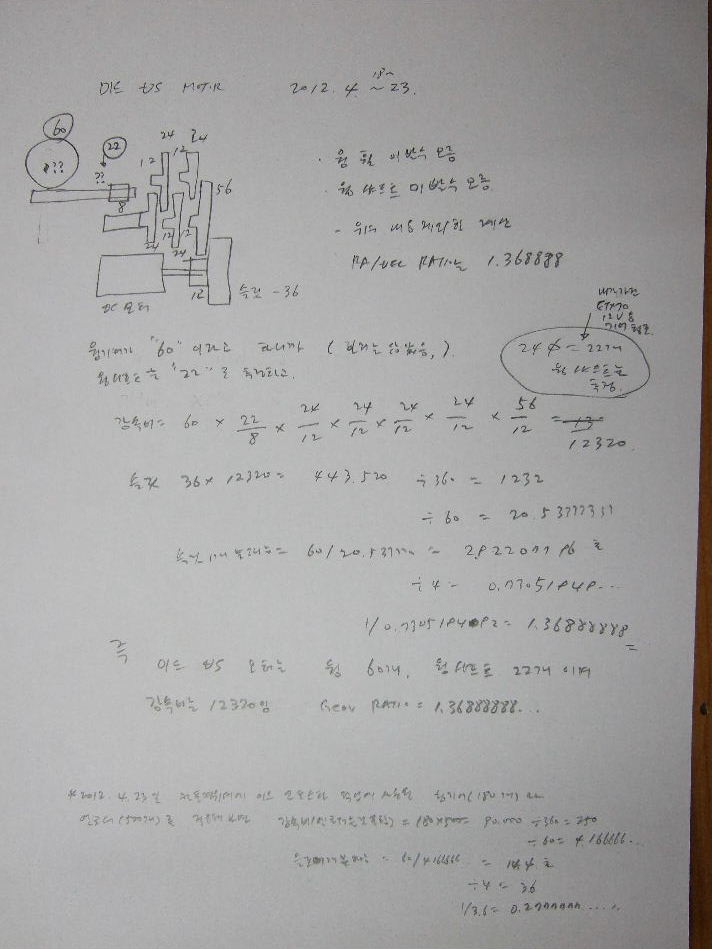
2012년 4월24일 추가
미드의 ds 모터 뭉치의 기어비를 조사했습니다.
총 감속비는 12320, 슬릿의 수는 36입니다. 오토스타의 기어 ratio 1.36888888 은 32320(->12320 오타정정, 2012년10월18일)과 36 의 숫자로 계산됩니다.
-
2012년 4월24일 추가
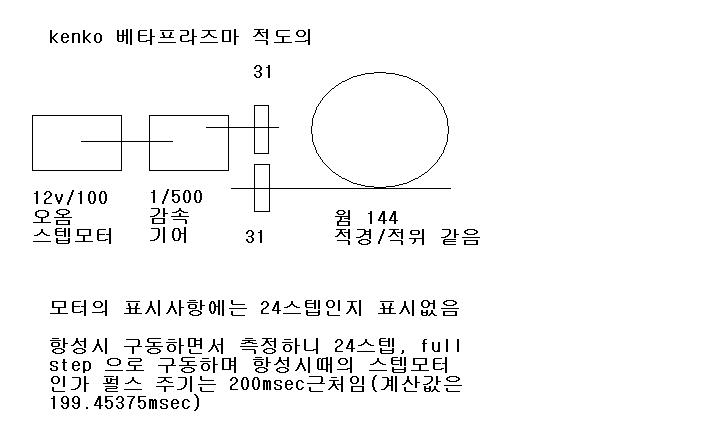
겐코 베타 프라즈마 적도의 메카일렉트릭.
12v, 24스텝 유니폴러 스텝모터, 100오옴 코일저항, 1/500 감속기어와 모터가 조립되어 있음,
31:31의 평기어로 144이빨의 웜기어로 구성됨.
항성시는 full step 주기 199.45375msec 로 구동함.
-
2012년5월23일 추가
em10
12v, 24스텝 유니폴러 스텝모터, 100오옴 코일저항, 1/250 감속기어와 모터가 조립되어 있음,
45:36의 평기어로 144이빨의 웜기어로 구성됨.
항성시는 2 phase full step 주기 319.12625 msec (또는 1펄스당 79.781654msec)로 구동함. 적위는 full step인데
적경은 full step 인지 half step인지 이직 모름 ( 하프스텝이면 위의 값에서 /2 해야 합니다.
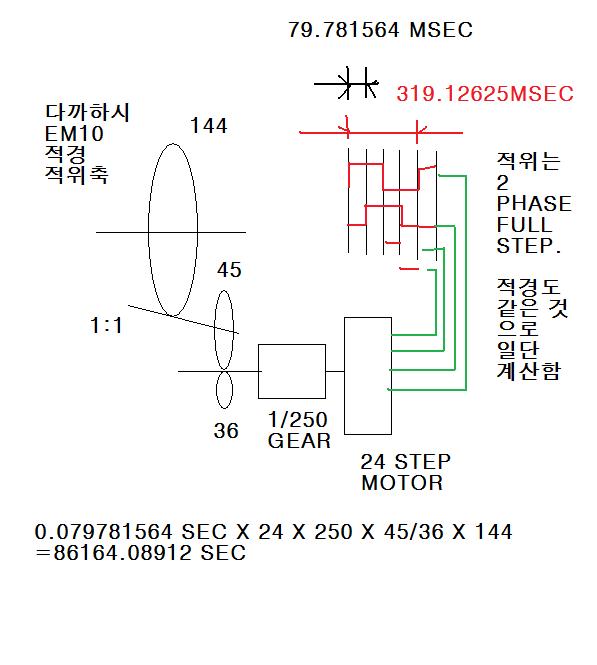
-
2014년 4월17일 17시16분 추가
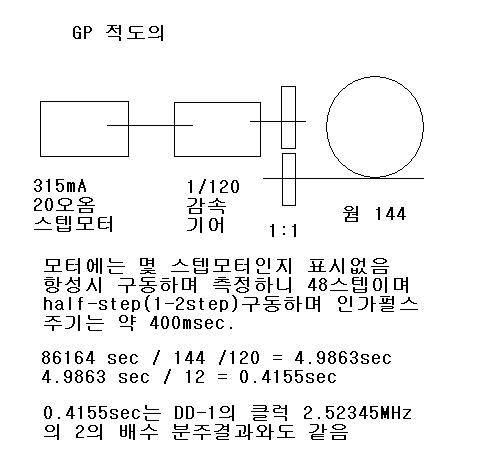
빅센 gp 구동값을 측정및 계산 했습니다.
모터는 20오옴, 1상 전류값은 315mA, 48스텝 유니폴로 스텝모터, 1/120 감속비, 144웜기어
모터구동은 415MSEC 하프스텝 구동(약 19.3 20PPS)
-
2016년6월23일 23시40분 추가
미드 LX-90-8/10/12
AZ/RA RATIO = -2.75075
ALT/DEC RATIO = 2.75075
-
2017년 12월11일 추가
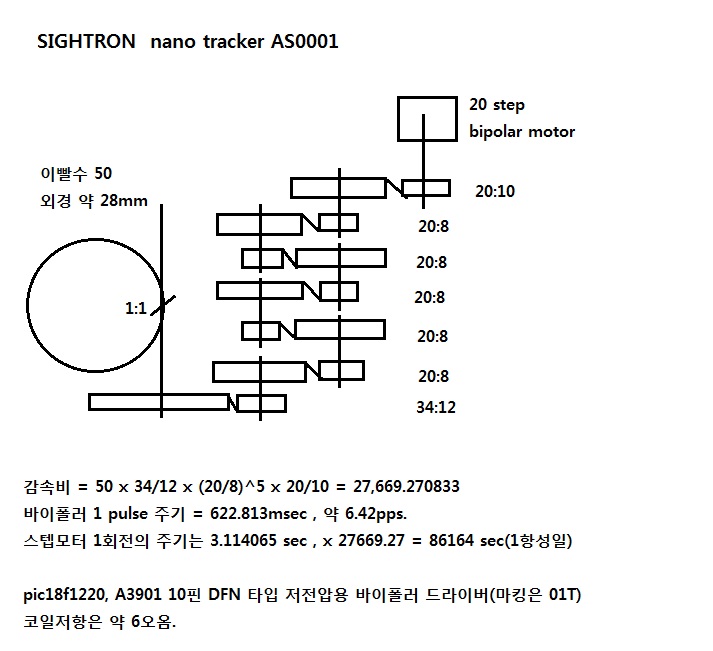
라쿠텐 (12월20일 정정), SIGHTRON 나노트래커 AS0001
최종 웜 지름 약 28mm 50 금속이빨, 스퍼기어 금속:프라스틱 34:12 , 프라스틱 스퍼기어 20:8 5개, 프라스틱:모터축 스퍼기어 20:10,
바이폴러 20 스텝(18도)-펄스 5주기로 1회전,
바이폴로 펄스주기는 622.813msec , 6.42pps.
사용전원 3-AA, 구동전류 약 320mA , X1, X0.5 , N/S ,POWER BUTTON
PIC18F 사용, 20M X-TAL, A3901 DFN 타입 10 PIN 저전압용 바이폴러 드라이버 (0.4A MAX) IC마킹은 '01T'
-
17년 12월20일 그림추가
-
2020년 3월 30일 추가 - em-500
기어비가 구형 신형별로 다를수가 있지만 제가 경험한 기종은 축에 7200 엔코더가 붙어있는 템마2 전후의
기종 입니다.
웜이 144 개로 규격표에는 적혀 있지만 ( 어떤 자료는 예전 기종으로 180 이라고 적힌것은 한번 보았지만 )
월과 감속기어 사이에 스퍼기어가 있고, 웜과 스퍼기어를 분해하지 않은 상태에서 웜과 웜에 붙어있는
스퍼기어와 웜의 이빨수를 추정하기가 쉽지는 않았습니다.
항성시 구동이 되는 조건으로 테스트를 여러번 해서 아래와 같은 기어비등을 구했습니다.
ra 는 정확한 값이며, 아마도 dec 도 같은 값으로 보입니다.
감속기어에 붙어있는 스퍼기어는 ra dec 모두 100 으로 확인했습니다.
모터는 1.8도 유니폴러 모터인데 바이폴러 결선이 되어 있었습니다(모터와 감속기는 기종별로 다를 겁니다)
감속기어는 36:1 이고,
웜에 연결된 스퍼기어는 120 이며, 웜은 144입니다.
최종 감속비는 144/1 x 100/120 x 36/1 = 4320 이며 200(full step) 을 곱하면 864000 이 되고,
항성시 구동은 full step 에서 약 10 pps, 1/4 스텝에서 40 pps, 1/8 스텝에서 80 pps 정도가 됩니다.
---> 계산정정 합니다.(2021년 5월 6일)
최종 감속비는 144/1 x 120/100 x 36/1 = 6220.8 이며 200(full step) 을 곱하면 1,244,160 이 되고,
항성시 구동은 full step 에서 약 14.4 pps, 1/4 스텝에서 57.6 pps, 1/8 스텝에서 115.2 pps 정도가 됩니다.
 열선 컨트롤러의 진화
열선 컨트롤러의 진화