
(1) 20110714
가) 8비트 2K 또는 4K 프로그램 메모리에 20MHz 클럭을 가지며 입출력 핀이 20여개인 반도체를 중심으로 만들겁니다.
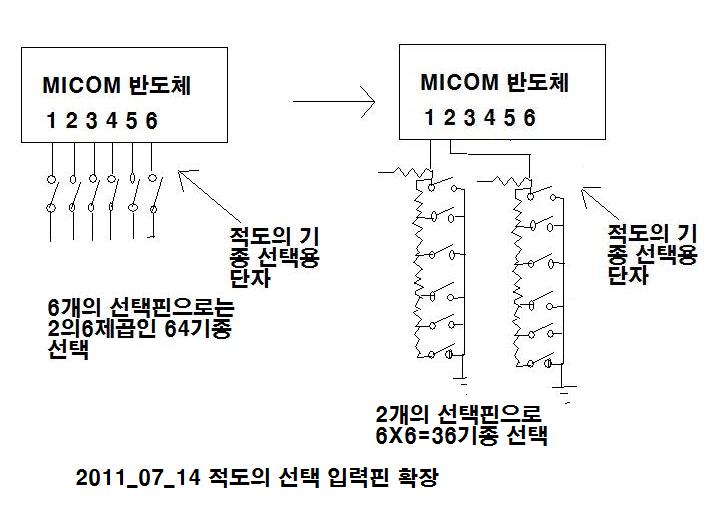
여러 기종을 목표로 삼았기에 여러 기종의 선택을 하기위한 마이콤(반도체)의 입력핀을 효율적으로 쓰기 위해
기종선택핀을 아나로그->디지털 전환용 포트를 쓰기로 했습니다. 이론상으로는 한 핀만으로도 1024개를 구분할수
있지만 여유롭게 대략 한핀당 6개~8개를 선택합니다. (그림참조;tel_select_input_extend_20110714m.jpg)
이 방법은 특별한 것이 아니고 아주 일반적인 겁니다. 나중에 복잡하다는 이야기를 제가 들을까봐 미리 선수^^.
나)적경 적위가 표시되도록 하겠습니다. 표시기를 부착할수도 있고, 안할수도 있게 겸용으로 만들겠습니다.
lcd 모듈(재료비 약 칠팔천원)로 할지 88 88 + 88 88 숫자로 할지는 미정입니다.
(2)20110720
EM200B 모터단자와 항성시 구동 펄스값 측정 (측정기는 hp 34401a)
모터는 참고로 적경은 P43, 12V/70오옴/4PHASE/15DEG/ SANRYUSHA CO JAPAN 와 기어박스
적위는 P43G, 12V/70오옴/(1/250 G/RATIO)/24 STEP SANRYUSHA CO JAPAN 기어박스는 없는듯.
모터에 연결된 전선은 2.54MM 핏치의 히로세 12핀(규격 모름)
1~12핀중 1~6핀은 적위용 7~12핀은 적경용으로 구분, 5,6,7,8 핀은 12V +전원 ON 스위치와 연결
1,3 은 같은 상/ 2,4는 같은 상/ 9,11은 같은상/ 10,12는 같은상 어는것이 언더바인지는 모름(안돌던지, 반대로 돌면 한선만 바꿈)
항성시 주기 = 319.122 msec or 3.13359 hz ( 다른 시간의 측정에서는 319.124msec와 3.13358hz로 측정됨)
적경 버튼 주기 = 183.2** msec (normal) / 20.42* msec(high)
적위 버튼 주기 = 247.3** msec(normal) / 10.217 msec(high)
속도조절용 볼륨은 모두 시계방향 최대위치, *표시는 조금씩 변하는 값(볼륨의 위치(delay 시정수)때문에 변동함)
측정포인트는 모터를 1:1 드라이브 하는 62084 ic 입력임(모터의 펄스노이즈 제거용)
알루미늄명판의 크기는 59.4mm x 103mm x 1.5t , 깊이는 28mm 여유
(추가20110721-유니폴러 스텝모더)
(추가20110723 12V 용)
(3)20110721
KENKO 베타프라즈마 적도의용 QMD TWIN 유니폴러 스텝모터 콘트롤러 (측정기는 HP 34401A 상동)
모터는 적경적위 똑같은 기어드 모타이며 내부 기어드 모터 표면에 1L/12V/100 마킹있음
적도의에 부착되는 모터박스의 단자는 큰딘 5a 암놈 형식이며 2번핀(핀번호는 5a 규격에 따름)은 +12v공통
1번과 4번이 같은상, 3번과 5번이 같은상. 직류저항값은 90오옴
항성시 주기 = 199.986 msec or 5.00035 hz
적경 버튼 주기 = 99.9930 msec or 10.0007hz (x2l) / 24.9982msec or 40.0028hz(x8)
적위 버튼 주기 = 적경값과 같음
측정포인트는 tmp4002(트랜지스터 4개, 1개핀은 gnd 공통)의 입력단(base)이며 모터는 빼고(노이즈제거) 측정
(추가20110723 12V용)
(4)20110722
VIXEN 적도의용 DD-1 콘트롤러, 유니폴러 스텝모터, 4 PHASE 이며 1-2 PHASE 로 구동함(8 CLOCK 으로 1주기, 5+3 CLOCK)
적경과 적위 모터 같음
모터마킹:PF42-4813G / PULSE MOTOR / 20(OHMS/PHASE) / 315(MA/PHASE) / 1/120(G.RATIO) / 4K3A(LOT)
NIPPON PULSE MOTOR CO. LTD , MADE IN JAPAN , 사각형 아연 다이케스팅 케이스와 검정 프라스틱 케이스용이 있음
모터 박스에는 큰딘 8A 암놈 형식의 콘넥터가 부착되어 있음. #8(COM)/#5/#1 과 #2(COM)/#3/#4 로 코일이 연결되어 있음
#6과 #5 핀은 사용안함, 8A의 샤시핀단자도 사용안함. 측정된 코일 저항값은 19오옴.
적경 모터에 입력되는 PULSE는 5+3 CLOCK 이 1주기인 1-2 PHASE 구동이며 항성시의 주기는 415.468MSEC / 2.40693HZ임
(모터의노이즈(작동중의 정상적인 상태) 때문에 측정을 위해서 항성시 에서만 100오옴 저항을 연결해서 측정함)
항성시/1.5X/2X에서는 모터에 +5V(정전압 경유) 가 인입되며 32X 에서는 12V가 인입됨.
아래의 적경 DATA는 모터 연결후 출력IC TA8415 의 앞단에서 측정된 값임(모터에는 8 CLOCK이 1 CLOCK 으로 되어야함, 주기는 8배해야함)
적경 항성시 51.9332msec / 19.2555hz
적경 1.5x +key 38.9499msec / 25.6470kz, -key 103.866msec / 9.62776hz
적경 2x +key 25.9666msec / 38.5110hz , -key 정지
적경 32x 1.62291(2)msec (2)표기는 끝자리가 1또는 2로 변함의 의미 1로 있는 경유가 더 많음 / 616.176(7)hz
아래의 적위 data 에는 모터연결후 출력 ic 62103(1:1 드라이브)의 입력에서 측정함
적위 1.5x **msec(모터 노이즈로 측정 못함) / 2.6** hz
적위 2x 207.733msec / 4.81388 hz
적의 32x 12.9833msec / 77.0222 hz
측정기는 hp 34401a
7월23일추가 ;
적위 1.5x 830.932msec / 1.20347hz, 모터대신 100오옴 저항부하로 재측정 적경/적의등 다른부분은 위의 측정값과 같음
적위는 1.5x 에는 4phases(1-2phase) 이며, 2x 와 32x에서는 4phases(2phase) 일반모드임
적경은 모든 모드에서 4phases(1-2phase)임
(추가 20110723 12V 임)
(5)20110723
빅센 DMD-1 콘트롤러, 스텝모터 구동, 6V 용
적경은 4 PHASES ( 2 PHASE ) , 적위는 4 PHASES ( 1 PHASE )
적경 항성시 124.647msec / 8.02264(5)hz
적경 2x 69.2484 msec / 14.4407hz
적경 8x 20.7746msec / 48.1358hz
적경 rev key 작동시 2x,8x 모두 정지
적위 2x 166.197mseec / 6.01697(8)hz
적위 8x 41.5491msec / 24.0679hz
큰딘 5a 플러그로 콘트롤러 출력임. #2(2 circuit commom),(#1,#3,#4,#5 핀은 출력선)
모터단자에 저항부하를 연결해서 측정함(HP 34401A) - 적경 측정시 주파수 측정오류 일부 발생됨(스코프로 재 확인한 값임)
(6)20110723
빅센 MD-6 1축 스텝 모터 콘트롤로, 12V용, DD-1과 항성시 구동속도 같음
4 PHASES (1-2 PHASE)구동
적경 항성시 415.489msec / 2.40680hz
2x 207.745msec / 4.81360(1)hz
16x 25.9680(1) / 38.508(9)hz
모터에 연결되는 출력은 확인못함, DD-1과 같은 출력단자로 추정
큰딘 8A 숫놈 형식의 플러그로 추정. #8(COM)/#5/#1 과 #2(COM)/#3/#4 로 코일이 연결되어 있을것으로 추정(DD-1과 같음)
모터 단자에 저항부하를 연결해서 측정함 (hp 34401a)
(7)20110723
셀레스트론 DUAL EQ4 바이폴러 스텝모터 콘트롤러, 6V용
항성시와 다른모드(적경 배속, 적위 배속)는 모터출력이 다름
항성시는 4분할하여 +2V/0V/-2V/0V 가 1주기로 같은 간격으로 출력되며 다른모드에서는 2분할하여 +2V/-2V 출력됨
2분할시 전압역전때의 지연시간은 측정하지 못했음
주파수와 주기가 안정적이지 않음 (*)숫자는 변동영역숫자임
적경 항성시 461.289msec / 2.16780(4)hz
적경 2x 230.646msec / 4.33564(71)hz
적경 4x 115.320(6)msec / 8.67104(55)hz
적경 8x 57.6591(630)msec / 17.3420(31)hz
적경 2x,4x,8x 위치에서의 rev key는 현재 전압상태(+2V/0/-2V)를 게속 유지함
적위 2x 691.936(39)msec / 1.33521(2)hz
적위 4x 345.966(73)msec / 2.89040(46)hz
적위 8x 172.981(8)msec / 5.78075(86)hz
모터단자에 저항부하 연결해서 측정함(hp 34401a)
모터출력은 모듈라 6핀 플러그출력임 #1~#6 핀중에 #1과 #6은 사용안함, #2와#5가 모터코일, #3과#4가 모터코일 연결됨.
(8)20110729
적경값과 적위값을 표시도 한다고 그랬으니 어떻게 심플하게 기능을 구현할까 가끔 생각합니다.
전원을 켜면 항상 항성시 구동을 하게되는 적도의 에서는 서로 다른 '지구의 시간'과 '천구의 시간'을 항상 비교
해야 해야 합니다. 2개의 시간을 동시에 놓고 비교하고 적도의가 정지되던지 빨리가던지 하면 그에 맞춰서
'천구의 시간-적경값'을 재구성 해야하지요. 상용 콘트롤러의 내부구성이 정확히 어떻게 구성되어 있는지는 별로
관심이 없습니다. 다들 각자의 목표하는 기능이 있어 그렇게 만든거고, 제겐 목표된 목적만을 위한 최소한의 기능구현이
필요하니까요.
현재까지는 별도의 '시간용 반도체-CLOCK IC'를 부착하는 겁니다. 이 시계는 지구시간이 아니고 '천구의 시간-적경'
용입니다. 전원을 켜면 이 시계는 적도의가 정지되어 있을때의 하늘을 향한 망원경의 적경시각을 계산합니다.
스텝모터가 항성시 구동을 위한 전기펄스를 받아서 돌면 마이콤(제가 만들 장치의 연산및 제어기능을 하는 부분)이
클럭용 IC의 현재 천구시간(적도의가 정지되어 있다고 판단하고 시간이 흐릅니다)과 전기펄스를 비교한후 현재의
적경시간을 보정헤서 적경시간을 표시합니다. 적위는 적위 펄스값을 받아서 표시하고요.
생각단계입니다^^
마이컴이 뭔진 몰것지만,
이왕이면 LCD로 해야 뽀대(?) 나것죠? ㅎㅎㅎ 문제는 핀을 마이 잡아 묵는 다는거고...
아~ AVR 가지고 놀 때가 새삼 그립네요..