이전 글들
Part 1 : http://www.sac-club.co.kr/xe/333726 (적도의 자작의 꿈)
Part 2 : http://www.sac-club.co.kr/xe/333812 (콘트롤러 선정)
Harmonic Drive (파동감속기) 기반의 소형 적도의를 만들려고 준비중에 있습니다.
이미 자작하신 분들도 계셨고, 시판 장비도 몇몇 나와 있기는 합니다만, 가격이 너무 비싸기도 해서 직접 만들어봅니다.
사실 웜기어를 활용한 적도의를 하모닉드라이브 기반으로 바꾸면 상당히 많은 장점이 있습니다.
1) 제작의 편의성 : 웜휠 구동을 위한 복잡한 디자인이 아니라, 단지 하모닉드라이브와 모터만 연결해서 직결 조립만 필요해 집니다.
2) 기구의 편의성 : 하모닉드라이브의 특성상 고토크 설정이 가능해집니다. 웜기어 자체는 점접촉형태라 토크를 높일 경우 기어 파손의 위험이 있었지만
하모닉드라이브 자체는 면 접촉 형태라 파손의 염려가 적고, 기본적으로 크로스롤러베어링이 출력부에 장착되어 있기 때문에
전방향에 대한 지지력, 안정성을 확보할 수 있게 됩니다.
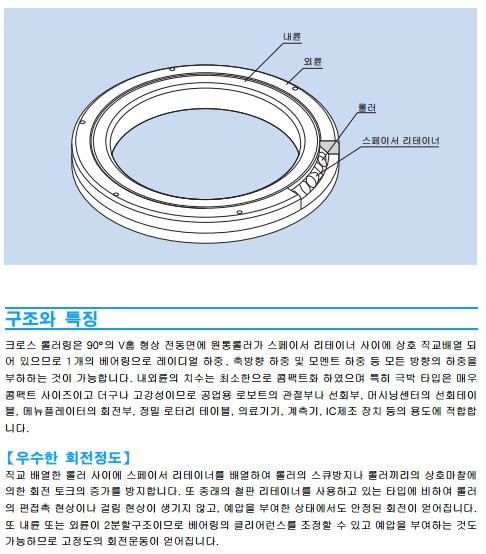
<크로스롤러베어링의 특징>
3) 장비크기 간소화 : 기존 적도의 보다 높은 적재중량을 견딜 수 있기 때문에 적도의 본체의 크기가 작아지게 됩니다.
4) 높은 정밀도 : 일반 기어기반 적도의에서 나타날 수 있는 백래시 문제가 발생하지 않는다고 합니다.
많은 장점이 있지만 단점도 있죠.
1) 높은 가격 : 신품 하모닉드라이브를 사용할 경우 스펙에 따라 다르겠지만 개당 150~250만원 정도되는 하모닉드라이드유닛이 2개가 필요합니다.
그래서 중고 하모닉드라이브를 구해서 자작하는 것을 추천합니다만, 적당한 스펙의 유닛을 쉽게 구하기는 힘든 편 입니다.
2) 피리어딕 오차 : 기구 특성상 일정하게 발생한다고 하지만, 오토가이딩을 할 경우에는 큰 문제가 되지 않습니다.
중고 하모닉 드라이브 유닛을 구할 수 있으면 실제 제작에는 어려운 점이 없어보였고, 실제 운용하는 분들의 의견도 나쁘지 않기 때문에
기존 운영하던 소형적도의 EM200usd2 를 대체하기 위해 자작을 결심했습니다.
일단 하모닉 드라이브 중고품을 구하기 위해 잠복에 들어갔는데 일반적인 부품이 아니다 보니 구하기 쉽지 않았습니다.
네이버 CNC관련 동호회 장터 및 중고 FA(공장자동화) 장비 판매점들을 뒤져서 저같은 경우는 8개월에 걸쳐서 3개의 하모닉드라이브 감속기를 구할 수 있었습니다.
하모닉드라이브 제품은 일본 HDS 사 제품이 전세계 독점이고, 일부 중국산 제품이 있는 듯 보이지만,
성능에 대한 보장이 애매해서 제가 마루타가 될 순 없기에 시도치 않았습니다.
* 하모닉드라이브 제품은 구성형태에 따라 컴포넌트 및 유닛 제품으로 나뉘는데, 컴포넌트+크로스롤러베어링 으로 구성된 제품이 유닛 이며, 중고를 구할때 유닛 제품을 구해야 합니다.
* 제가 8개월간 중고로 천천히 구한 CSF17, 1/100 유닛, CSF14., 1/50 유닛 및 CSF32, 1/160 컴포넌트를 구해서 csf32에 맞는 크로스롤러베어링를 알리익스프레스에서 구했습니다.
최초 CSF32 및 CSF17 을 활용한 적도의를 구상했습니다만.
CSF32 자체가 대형 유닛이기 때문에 (탑재중량 50kg+ 가능한 스펙) 적도의 자체가 대형이 되더군요. 저는 중소형 적도의가 필요했지요.
(적도의 베이스 크기를 6인치 미만으로 설계하려고 했는데 CSF32 유닛 자체의 크기가 지름 138mm 에 달하기 때문에 설계를 잘 하지 못하면 크기가 너무 커집니다.)
그래서 여러번 cad 설계면 그린 것을 뒤집어서 RA축에 CSF17, DEC축에 CSF14 유닛을 탑재한 형태로 구성하기로 했습니다. (베이스 크기가 125mm 로 가능하더군요)
관련 부품들을 주문했습니다.
- 기어드 스테핑모터 : NEMA17 사이즈, 스텝사이즈 1.8도 기반의 1/5.18 및 1/13.78 감속비 모터 2대씩
- 예비 스테핑모터 : NEMA17 사이즈, 스텝사이즈 0.9도 기반 정밀 모터 2대 위의 기어드모터로 구성후 보다 높은 정밀도가 필요한 경우 교체할 예정 입니다.
- 커플링 : 기어드스테핑모터의 축 사이즈가 8mm 인데, 제 중고 CSF14 유닛에 10mm 모터축이 끼어져있고 분리가 안되어서 솔리드 타입의 10mm-8mm 커플링을 주문했습니다.
- 몇몇 철물 : 2만원 어치의 육모볼트 (M4, M5, M6 사이즈 다수) 와 경첩볼트, 손잡이 볼트 여러개를 주문했습니다.
- 뼈대부분은 CAD로 설계해서 머시닝센터 업체에 견적의뢰에서 제작을 요청했습니다. 이게 좀 비싸네요. 5월20일 정도까지 마무리 해준다네요.
- 그리고 적도의 컨트롤러가 필요합니다.
적도의 컨트롤러에 대해서는 이미 글을 두번 작성했습니다만, 이걸 제일 먼저 테스트를 위해 구했습니다.
제가 임의로 만들 수 없는 중요한 기능을 제공하는 부분인데, 제가 자작하기는 뭐하고 기성품을 써야 하는데..... 유명한 기성품들은 상당히 비쌉니다. (FS2 나 MTS-3, SItech 등)
뭔가 해결방안이 없을까 생각도 했고, 직접 아두이노 베이스 프로그래밍 까지 해서 만들어봐야 할까 고민을 했습니다만....찾다보니 길이 있네요.
영국의 한 프로그래머가 일을 벌여놓은 곳을 알아냈습니다. AstroEQ ( www.astroeq.co.uk )
What is AstroEQ
AstroEQ is a DIY System for converting any equatorial telescope mount into a Go-To mount which connects to ASCOM star maps via the excellent EQMOD software.
This project uses the same communications protocols as the SkyWatcher/Synta controllers opening up the possibility of using EQMOD with any mount.
An open loop control system is used meaning that all that is necessary to fit AstroEQ to a mount is a pair of stepper motors (one for each axis) - no need for expensive encoders or servo motors.
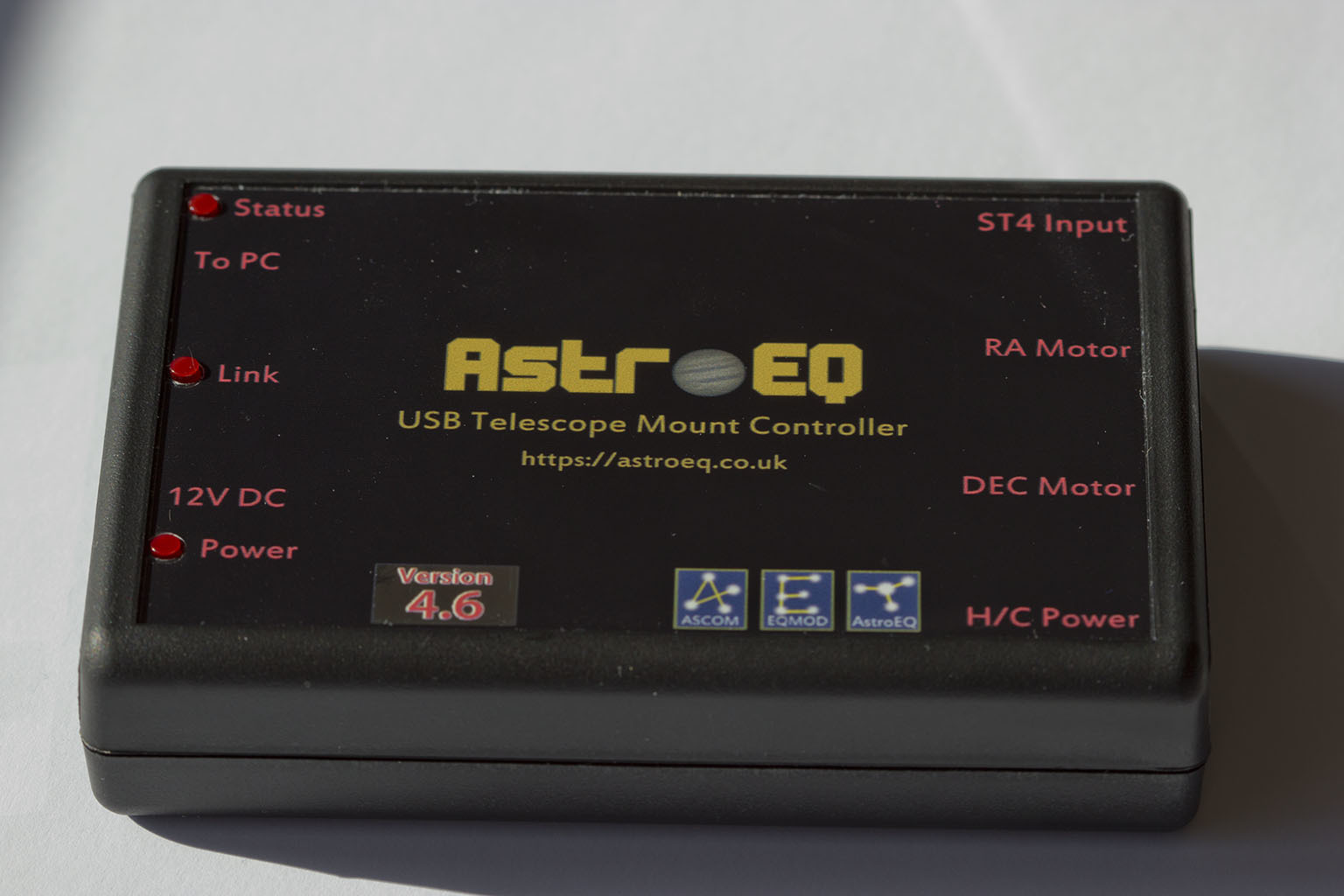
뭐 해당 사이트 가보니 아두이노 메가 베이스로 해서 프로그래밍후 별도 PCB 베이스의 자작품도 판매하고 있습니다.
가격이.....정말 혜자 스럽습니다. 2017년 4월 기준 82영국파운드. 12만원돈 이네요.
아두이노메가2560 보드와 스테핑모터 콘트롤러 2개를 우리나라에서 구매하면 대략 8만원 좀 넘게 들텐데,
eqmod 기반 ascom 연계 프로그래밍 및 IC 까지 다 해서 12만원이라.....정말 공짜나 다름없단 생각이 들었습니다.
뭐 바로 주문했죠.
배송후 astroEQ 성능 검증을 위해 마루타를 만들었죠. 제 em200 usd2 적도의를 갈랐습니다. 모터 교체를 하면서 기존 다카하시 콘트롤러를 들어내고
nema17 사이즈 모터를 넣고, astroEQ 를 연결했습니다. (이거 생고생이었습니다. 너무 좁아서 모터 넣기가 너무 힘들어요. 모터브라켓까지 다시 제작을....쩝)
뭐...잘 작동합니다. 모터 선택을 잘못해서 속도는 그리 빠르게 안나오지만, ascom 기반으로 pc와 연결도 잘 되고 goto 도 가능하네요.
사진도 찍어봤습니다. http://www.nightsky.kr/xe/5105 요기 사진 보면 가이드 문제 없어 보이죠?
잘 됩니다.
이제 하모닉드라이브 기반 적도의를 정말 만들기로 결심했습니다.
그리고 하모닉드라이브 중고를 상당히 오래걸려 구하고, 책보고 배운 cad 실력으로 도면 3가지 버젼으로 그려보고.......
이제 다 되어서 가공 완료를 기다리고 있습니다.
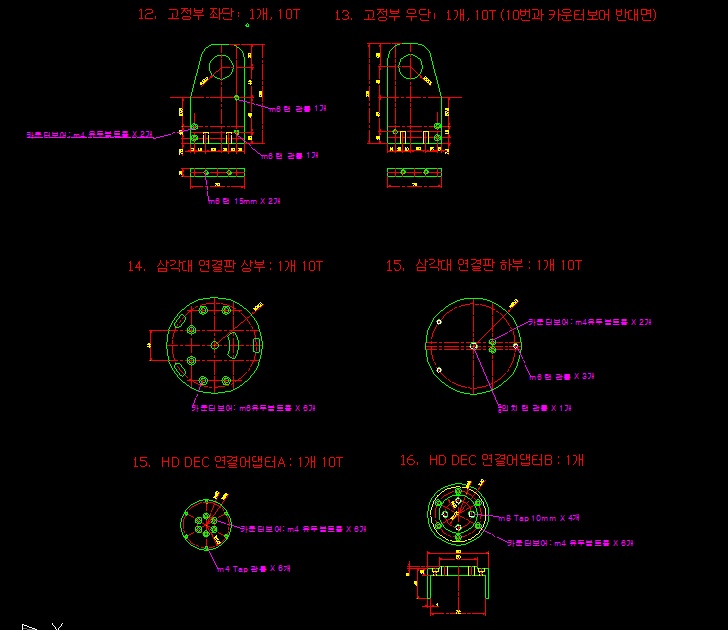
(캐드 작업화면 일부. 이거 알아봐주는 가공업체 사람들이 고맙지요...ㅋ)
잘 가공되길 기원해 봅니다.
Part4 및 테스트글을 적을 수 있게 되길 바랍니다. ㅎㅎ
 제 적도의를 처분하려고 합니다.
제 적도의를 처분하려고 합니다.













