전기 구동 망원경중에서 가장 싼 제품을 꼽으라면 미드의 etx60 또는 etx70이 그 반열에 들겁니다.
그 제품을 중고로 구해서, 전기부품만을 떼어내서 셀레스트론 c11을 구동시키는데 사용했었습니다.
경통이 남아있고, 콘트롤러가 남아있고, 감속기어를 포함한 웜기어가 남아있었습니다.
1축 스텝모터 콘트롤러(기시기)를 끝내놓고, 1축 모터의 활용으로 손 대는 것이 피기백입니다
이미 범용및 상용의 기어박스를 몇개 사서 조립해보고 생각하고 있습니만,
이와는 별도로 예전에 활용한 윗글의 etx60의 수직기어뭉치가 생각나더군요.(어제)
dc모터부분의 축의 두께와, 두모터(기존의 dc모터와 새로 박아넣을 스텝모터)의 폭이 같거나
비슷하면 아주 쉽게 간단히 안쓰는 물건을 활용할수 있을거라 생각했습니다.
정말 기분 좋게도 두 모터의 축의 지름과 크기가 거의 같습니다. 길이는 다르지만 작아졌으니 조립에는
문제가 없을거구요.
etx60/70의 수평축 기어비가 9135라서 1초에 2바퀴를 돌리려는 계획이
1바퀴정도로 줄어들었지만 그래도 1초에 30번정도의 펄스또는 60번 정도의 펄스(30pps또는 60pps)는 줄수 있을것 같습니다.
(--> 27일 0시반에 정정 1/10 바퀴정도로 줄어 들었습니다. 1초에 5번 정도의 펄스를 줄수 있을것 같습니다., 많이 부족합니다)
스텝모터는 제가 계속 테스트하는 24스텝 65오옴의 유니폴러 스텝모터이고요.--> 2월29일, 48스텝으로 정정(표시가 안되어 있어서
제가 손으로 돌려보고 추측했는데, 손으로 돌리면서 확인하는 방법이 아니네요^^)
항성시 값을 찾아서, 초로 표현한후에, 기어비 9135 로 나눈 시간(초)에 한번씩 스텝모터를 한바퀴 돌려주면 됩니다.
정확한 항성시 값을 찾아야 하겠군요^^ 태양시와의 비율이 365.24***:365인가 365,24**:(365.24**-1)인가????
태양시는 24 x 60 x 60 초이구요^^.
-
27일 0시반 추가
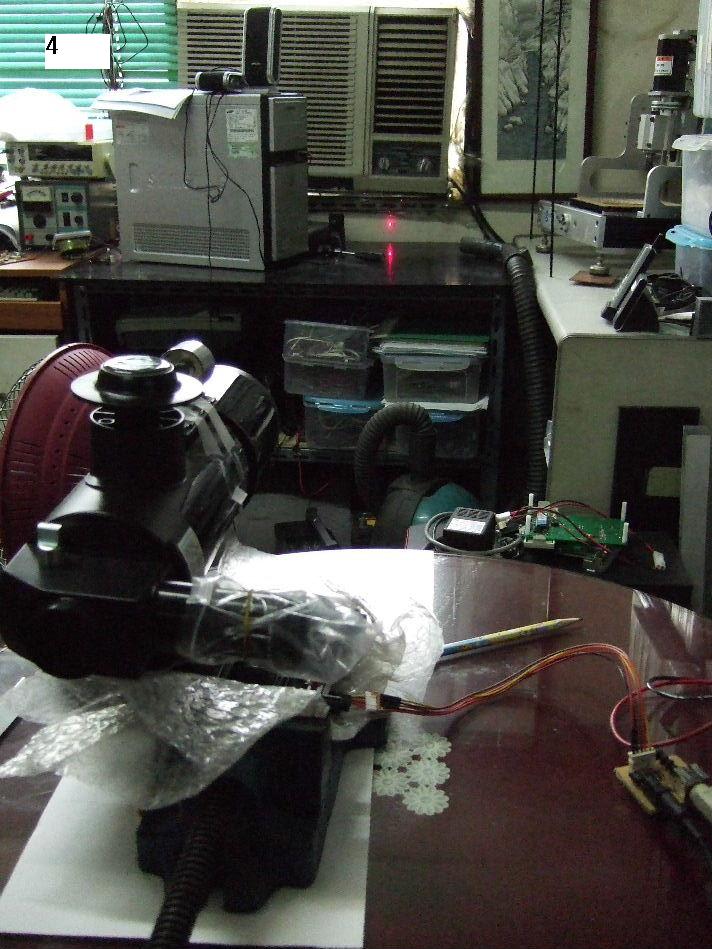
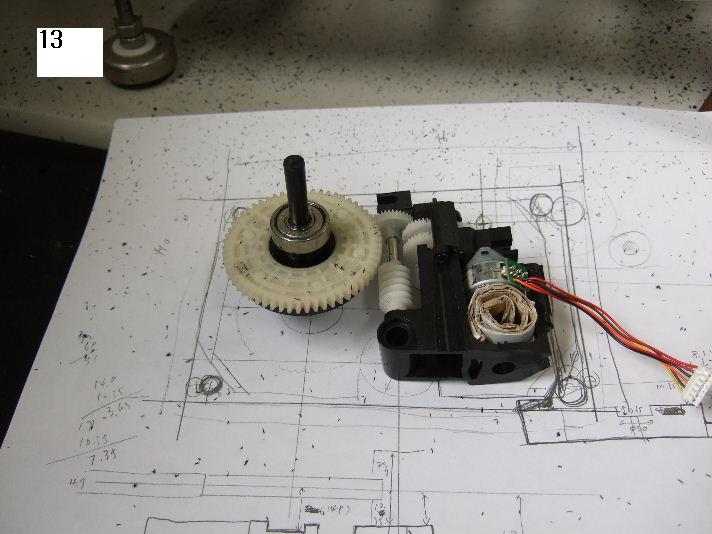
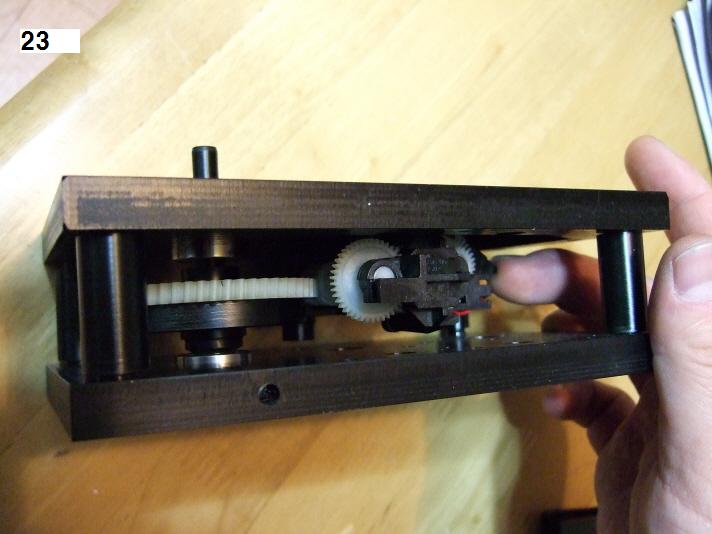
스텝모터를 dc모터 위치에 집어 넣은후 1초에 한바퀴도는 속도로 24스텝의 모터(다행이 모터축의 굵기가 2mm 정도이고,
모터의 외경이 24mm 로 거의 같아서 조립이 잘 되었습니다. 기존의 모터에 붙은 톱니기어를 손상없이 빼는 잔재주가 필요하고,
DC모터 부근의 프라스틱을 조금 깎아주어야 조립이 됩니다.
1초에 한바퀴도는 속도로 대충 계산해 보니 한바퀴에 5시간쯤 걸립니다. 스텝모터에 인가되는 펄스를 이 시스템의 항성시에
맞추어서 만들어야 하겠습니다.
지금까진 만든 항성시 구동용 펄스는 EM2S/P2Z용 19.945MSEC인데 이 ETX70 수직축용을 계산해서 만들어서 모터를 구동하렵니다.
24MM 지름의 소형 기어가 포함된 스텝모터가 있으면 좋을텐데... ((( -->3월1일 1시추가, 기억해보니까 모터포커스용으로 테스트중인
기어드(geard) 스텝모타가 있었네요 ㅋㅋ))
이제 이것에 축과 관계된것, 다른 고정장치및 장비부착용 부분을 고려해야 하지요.
그림속에 사진 1,2는 지금 추가된 겁니다. ETX70의 상하이동 암이 피기백몸체가 되는 것인데,
몸체를 고정하기 위해서 임시로 무거운 쇠 조임쇄로 아래를 붙잡아 놓은후 ETX60 경통을 올려놓고 돌리고 있습니다.
-
27일 12시40분쯤 추가
항성시간 값을 찾아봤습니다(구글, 위키피아,네이버등)
..1 항성일 = 23.9344696 시간
..평균항성일이라고 하는 것이 정확하다. 0.99726957일 또는 23시간 56분 4.0905초이다
..태양이 춘분점의 위치에서 시작하여 다시 춘분점으로 오기까지 걸리는 시간이며 약 365.2422일이다
..한편 임의의 멀리 떨어진 항성을 기준으로 한 시간을 항성년이라고 하는데 이는 약 365.2564일이다.
두 시간의 차이는 춘분점이 매년 50초 정도 서쪽으로 이동하기 때문에 생긴다..
위에서 23.9344696시간이 어떻게 나왔나를 계산(수학적 사고가 아닌 마구잡이 대입)해보니
365.2422 / (365.2422 + 1 ) = 0.997269566.. 이되고, x 24하면 23.934469594.. 이 나오네요.
암튼 1항성일이 23.9344694 시간이고, x 3600(초)를 하면 86164.08984초 이제 이값을 항성시 구동용 펄스의
기본이 되는군요.
**2016년 1월23일 21시0분 추가**
("위의 계산식에서 오타가 발생했습니다. 아래글이 맞습니다
이후 글에서도 정정해야 하지만 그냥 놓겠습니다....") .
암튼 1항성일이 23.934469594 시간이고, x 3600(초)를 하면 86164.09053초 이제 이값을 항성시 구동용 펄스의
기본이 되는군요.
**2016년1월23일 21시0분 추가끝**
위의 etx70의 수직축 기어비가 9135 이니까 86164.08984 초 동안에 한바퀴를 돌아야 하니까
86164.08984초/9135 = 9.4323032118초 동안에 한바퀴이고, 24스텝의 모터의 경우 1스텝을 이동하기 위한
모터에 가해주는 시간은 /24 하면 0.3930126338 초가 되네요.
모터를 하프스텝모드로 하면 1바퀴당 2배인 48펄스가 필요하니까 /2 를 또하면
0.1965063169 초가 되네요.
196.506msec의 펄스를 만들어야 하네요. 이러면 1/0.196506 = 5.089.. pps 밖에 안나오넹.....
-
2월29일 추가 , 윗글은 모터가 24스텝일 경우로 제가 게산한것이었는데 48스텝이니까
위의 daa에서 모두 반으로 해야하겟네요, pps는 2배로 하고.
즉 48 스텝으로 etx70 감속비 9135 에 걸면,
full 스텝으로는 196.5063169msec,
half스텝으로는 98.25315845msec, 10.177.. pps
-
29일 18시30분쯤 추가
98.2532msec 로 클럭을 마이콤으로 짜서 넣었고, 48스텝의 모터를 하프스텝모드로 돌리고 있습니다.
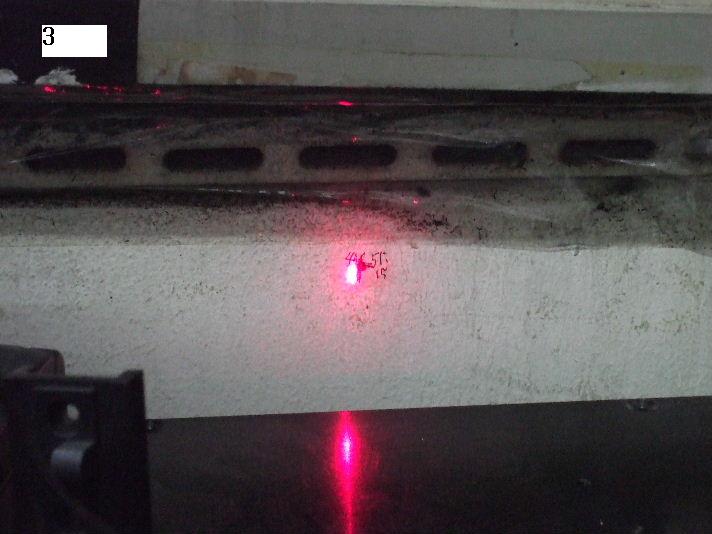
암축에 붙어있는 60mm 경통을 떼어냈습니다(아래쪽이 부실해서 경통쪽으로 무게가 많이 치워쳐서 고정이 어려워서)
아니피스홀더에는 레이져포인터를 박아서 타켓을 조준했구요.
18시20분에 가동을 했구, 7분후인 27분에 한뼘(눈대중으로 약 15cm)정도를 이동했습니다. 타켓점까지의 거리가 약 5~6m 떨자진 거리고요.
5미터 거리에서 15cm를 7분간 이동했으면 tan 15/500 = tan 0.03 , 아크탄젠트 0.03하면 1.7도, 이거리를 7분동안 가는거라면
1.7도 x 60 분 / 7분 x 24시간 = 353도, 이정도면 하루에 한바퀴가 돌거고(밤중에 정전만 안되면) 내일 저녁에 4분 못미치는 시간에
그자리에 오면 일단락 짖는 거지요^^
-3월1일 18시쯤 추가.
3월1일 동네 뒷산을 4시간쯤 돌다가, 17시40분쯤에 확인하러 사무실에 들렸는데, 스텝모터가 헛돌고 있더군요(약 20도쯤 돈 상태에서).
제가 크램프를 꽉 조이고, 아래쪽을 바닥에 꽉 고정하느라고 바이스로 꽉 물어서 웜기어가 눌리면서 주변부와 꽉끼었나 봅니다.
아직 웜기어등의 기계부속은 아무런조치를 하지않은(베어링도 넣고 기름칠도 해야하는데,,, 이건 다음에,,,) 상태이므로
크램프를 조금 풀었습니다. 크램프를 꽉 조이면 웜기어와 주축뿐만 아니라, 주축과 외측 구조물도 조여지는 구조라서요.
내일 5시49분에 또 학인해야 합니다^^, 3월1일 17시53분0초에 리셋했습니다.
-3월2일 18시 15분 추가.
어제 17시53분의 표적을 오늘 17시58분에 지났습니다. 49분에 자나야 하는데, 9 분이나 늦게 지나갔습니다.
0.625% 의 오차입니다.
기어수를 다시 세어 보았으나 이상없고(9135감속비), 혹시 전기실에 전화해서 어제 정전도 확인했지만.....
오늘 다시 크램프를 조금 더 풀어서 18시13분0초에 리셌햇습니다. 이놈이 저처럼 끈길기네요^^
-
3월3일 18시5분 쯤 추가
아직 18시9분이 되기에는 몇분 모자라지만, 어제보다 시간이 더걸리것 같습니다.(laser표적불빛이 한참 못미쳐 잇습니다.
어제 크램프를 조금 풀어놓고, 웜기어와 회전축의 결합부분(밀리지 않아야 합니다)을 유성팬으로 칠을 했는데,
하루를 돈 지금 보니까 슬립이 일어난 것을 확이햇습니다. 클램프를 풀었더닌 슬립이 더생겨서 시간이 더 걸린것 같습니다.
아직 한바퀴 타켓이 오지 않아서 지연 시간을 확인하지 않았지만 유성 매직의 표시가 정확하지요.
이제 오늘을 크램프를 꽉 조인고, 축에 기름칠을 해서 마찰을 줄여서 또 해봐야죠^^ ,, 18시23분 40초에 어제 위치로 왓습니다.
14분 지연되었네요.

3월3일 18시42분 0초에 4번째인지 5번째 리셋했습니다. ㅋㅋ.
-
3월4일 19시04분 추가
오늘은 약 23초 지연되었습니다. 18시38분27초에 어제의 타켓을 통과했으니까요.
그냥 그대로 하루를 더 돌려봐야 하겠습니다. 내일도 같은 값이라면, 클램프를 한번더 꽉 조여보던지 하겠습니다.
하긴 이정도에서 테스트를 중지하고, 웜에 물리는 축을 튼튼한 구조로 가공해도 되지요^^(어차피 이상태에서
사용할수는 없지요.) 케이싱을 기대하세요^^
-
3월5일 18시50분 추가
오늘은 약 12초가 지연되서 어제의 표적을 통과했습니다. 오늘 타켓 통과시간은 3월5일 18시34분 43초
86176초에 한바퀴를 돈겁니다. 항성시인 86164와는 12초가 차이납니다.
12초는 12/86164 = 0.000139, 즉 139 ppm 의 오류이네요. 10.000MHZ의 오차는 아니것 같고, 바닥의 고정장치가
부실해서 그런것 같습니다. 항성시 구동용 클럭회로는 일단락 짓습니다^^
12초는 각도로 환산하면 12 X 15 = 180초각이고 3분각의 오차네요.
-
3월7일 18시40분쯤 추가
이것이 처음 본문 끄적임 포함해서 14번째 추가글입니다. hhh
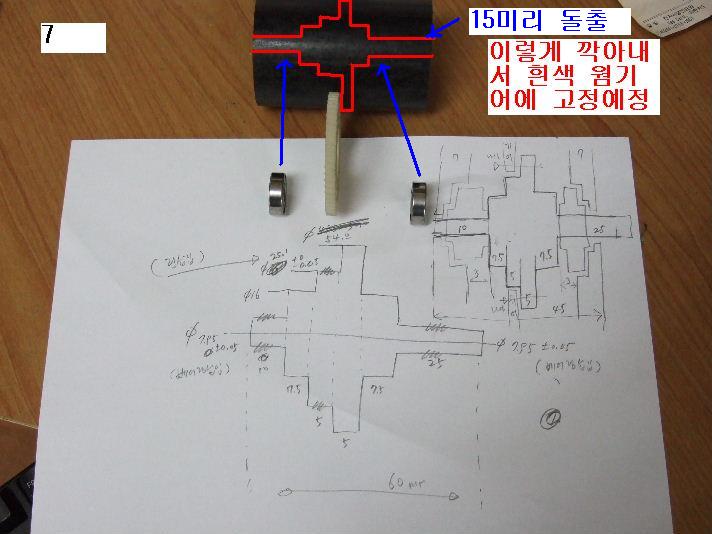
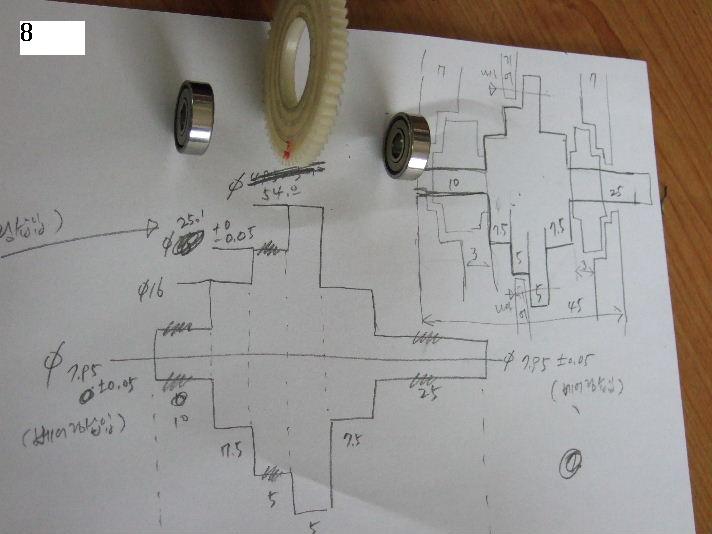
아까 오규섭님이 점심을 사주셔서 먹고 오는 길에 제 작업실과 30미터 거리의 산업용 프라스틱 재료가게에서
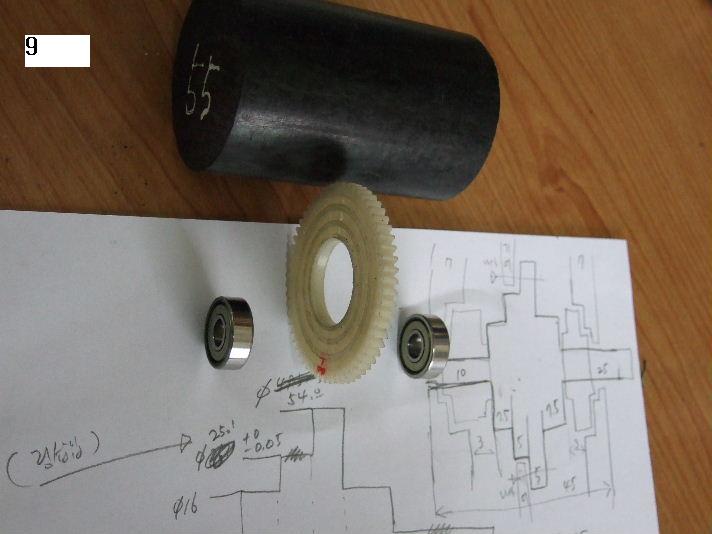
아세탈 지름 55mm 의 봉 9cm 잘라진것을 이천원에 샀습니다. 그림과 같이 선반가공을 해서 그동안 테스트했던
미드의 웜기어에 끼워고 고정을 하려고합니다. 제가 선반작업을 하려고 일부러 금속이 아닌 조금 딱딱한 프라스틱을
골랐습니다. 사진의 흰색 베어링은 제가 가지고 잇던것 이고요. 흰색 베어링은 케이스의 앞과 뒷면에 부착하여
웜기어가 편심없이 잘돌게하기 위함이고요. 이 작업(선반, 원형가공)이 끝나면, 다음은 케이싱작업이 남아있구요.
케이싱 작업은 저의 작은 cnc로 작업이 될것같습니다.(선반에 제가 만만한 곳에 가서.....)
-
3월 9일 0시7분쯤 추가,. 15번째 ....
사진(10,11,12) 처럼 원통 프라스틱(아세탈)을 깍았습니다.
눈금도 없고, 오른쪽방향은 깍는 팁도 없고, 팁을 물리는 바인스는 흔들거리고, 더우기 척이 4발이라서 뒤집어서 끼울수가
없어서(뒤집으면 축중심이 안맞음) 고생했습니다. 4시간반 작업했다면 믿으려나..... 아무튼 길이 방향의 칫수는
조정을 했지만, 베아링과 웜 샤프트등의 중요 치수는 한번에 끝냈습니다. 베어링의 외축에 맞물려서 고정하는
케이스는 현재의 칫수를 기준으로 만들면 됩니다. 이후의 작업은 직선 가공 이므로 제 작은 cnc로 됩니다.



-
16 번째 코멘트 - 2012년 3월10일 23시50분 추가
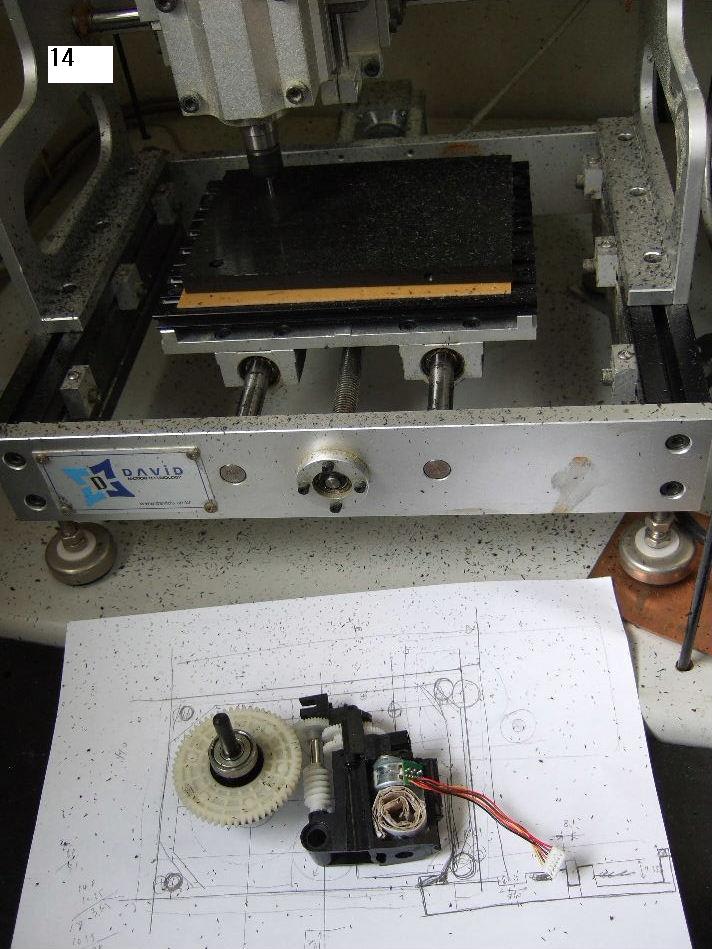
약 5시간 천천히 조심조심 가로 160mm 세로 110mm 두께 10.8mm 아세틸판을 작은 cnc 의 3mm 엔드밀(cnc는 이강순님이
연결해준거고, 엔드밀은 송방용님이 한 웅금 집어준것)로 가공 했습니다. 윗판을 가공햇으니 cnc 가공의 2/3 정도가 끝난겁니다.
벽체는 가공을 안할겁니다. 원히 내장이 보이는 심플하게 만들겁니다. 어차피 보면서 여러번 고쳐야 하니까요.


-
3월11일 19시30분 추가, 17번째
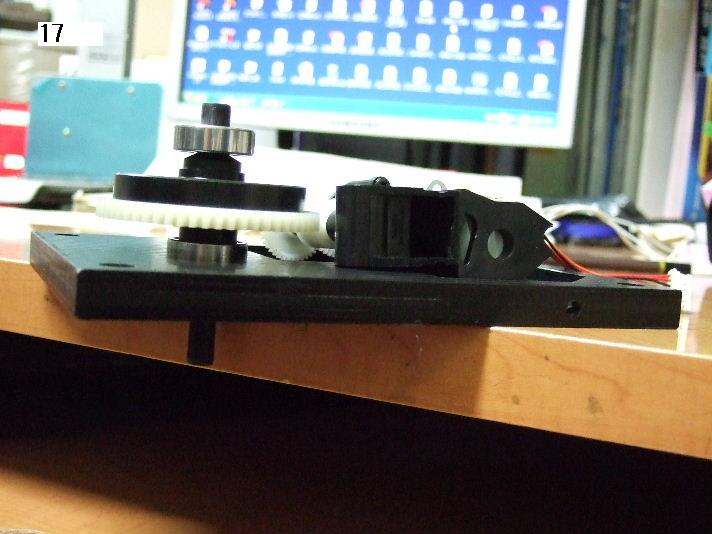
약 3시간(평평하게 깍는데 1시간 포함)동안 반대쪽 판을 깍았습니다.
윗판과 아래판은 둥근 막대에 턱을 만들어서 간격을 맞출겁니다. 이건 선반박업을 해야 합니다.
가지고 있는 아세탈 판재를 재활용 하느라고 원하지 않는 곳에 구멍이 있습니다 zzz
내부의 기어를 고정하고, 백러쉬방지를 위하여 웜 기어를 밀어주는 스프링 받침대도 깍아 넣어야지요.


-
3월13일 23시쯤 추가, 18번째 코멘트네요
오늘 약 3시간동안 원통을 소형선반으로 깎았습니다. 원통 아세탈을 구하지않고, 여분의 판재를
원통으로 가공한후에 같은 길이로 4개를 가공했습니다. 1개는 기어박스를 고정해야 하는데
길이가 짧아서 들뜨게 되는데, 요것은 cnc로 가공해서 기어박스가 고정되게 할겁니다.
웜기어를 밀어주는 스프링을 고정하는 구조도 간단히 해야하고요.
서너개의 작은 부속의 가공만 남았습니다.



-
3월15일 23시쯤 19번째 추가
내부에있는 기어박스를 고정했습니다. 2시간쯤 선반작업하고 30분쯤 칼질과 줄질했습니다.
위아래판의 조립은 적당한 볼트를 구하면 됩니다. 자주 열어봐야 하니까 아직 조립용 볼트는 안 채울립니다.
기어박스가 웜에 잘 밀착되는 구조이기 때문에 방금 1항성일만큼 갈 거리(각도,360도)를 확인하려고 모터전원을 켰습니다.
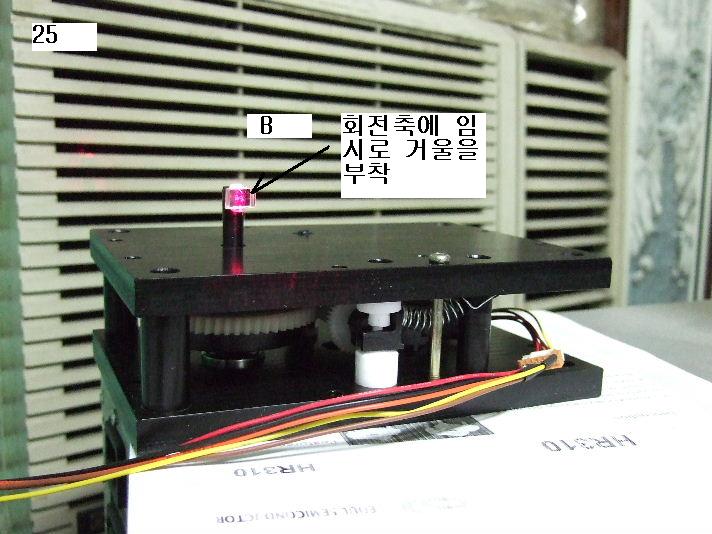
샤프트축에 아직 달아놓은 것이 없지만 임시로 작은 유리를 붙여서 오늘 위치에 내일 그자리에 오는지 확인할겁니다.
벽시계로 22시49분0초 시작.
---
3월17일 23시40분, 20번째 추가 글
어제 밤에 확인 해야 했는데, 12시넘어 사무실로 오는 바람에 하루를 더 돌렸습니다.
2일 동안 두바퀴를 돌았으니 산술평균해보니, 한바퀴 도는데 86167.5초 걸렸습니다.
23시19분15초에 그저께의 타켓으로 왔음.
86164초와는 3,5초가 더 걸렸습니다. 3,5초의 data는 현재 만족합니다. 약 6~7미터의 거리에서
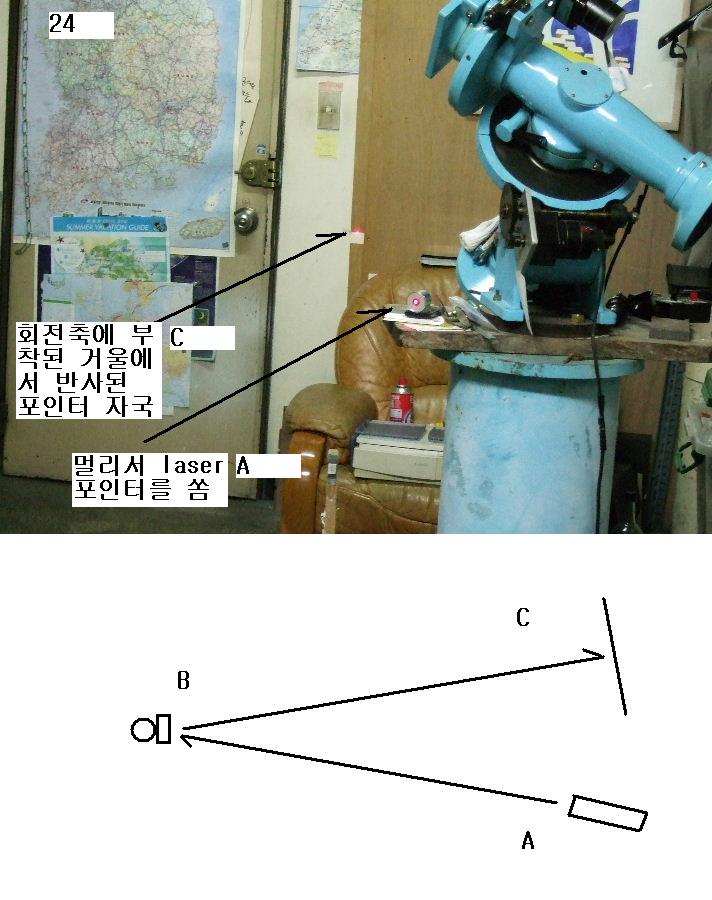
표적이 3,5초동안 약 3mm 이동하는속도로 보입니다. 이번 거울방식은 분해도가 2배로 되는 구조입니다.
그만큼 정밀하게 data를 측정할수있는 방법이네요.
윗판과 아래판을 조이고, 축에 카메라등을 고정하는 구조를 만들고, 아래쪽에는 삼각대와 고정하는 구조를
만들면 완성이네요.
아까 오후 부터는 전기회로를 콤팩트하게 만들고 있습니다.
-
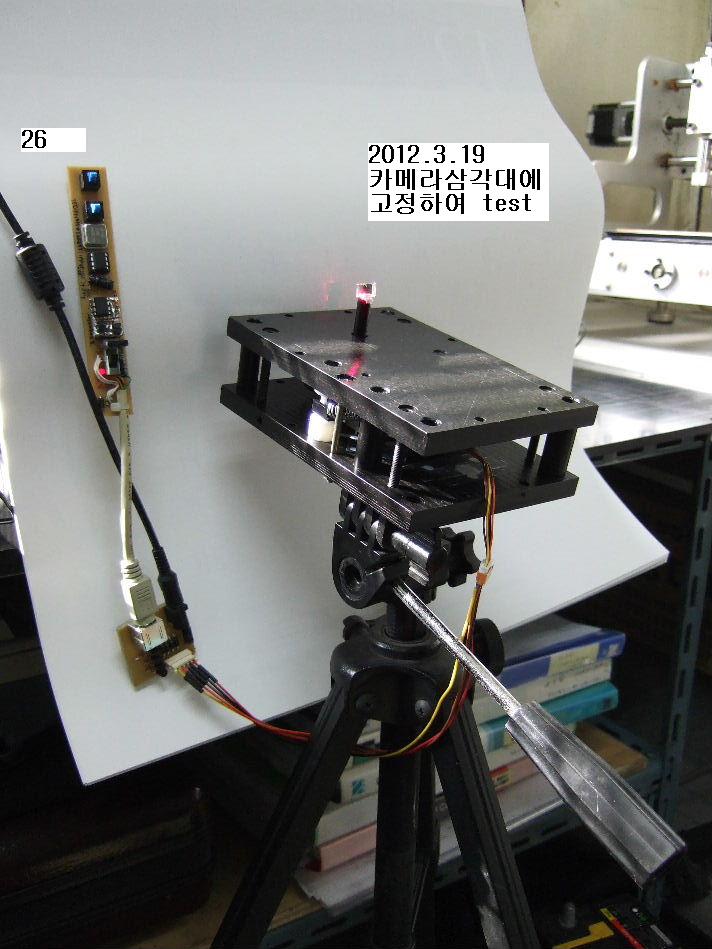
3월19일 18시55분 21번째 코벤트 , 본체의 기계장치 주요 동작부분 완성됨,
오후에 삼각대의 1/4인치 카메라인치나사 구멍에 맞는 넛트를 끼워 넣으면서 본체조립을 일단락 지었습니다.
축에 부착할 도구를 만들면 됩니다. 볼헤드를 고정하는 구조를 만들어야 합니다.
1축및 2축 전용 콘트롤로는 어제부터 시작했구요.
오늘 15시35분0초에 표적을 지나갔습니다. 내일 조립한후의 결과가 나오네요^^
20여일간 매일 매일 고민해보니 현재의 9135 감속비를 9배 늘릴 방법이 보입니다^^ ㅋㅋㅋㅋ (현재 구조에서 더하기 알파2개)
이방법이 적용되면 감속비는 82215 당초 목표치에 다가갑니다.
거울을 이용해서 정밀도의 측정을 2배로 늘리는 방법도 큰 수확(만족)이었습니다.
-
**2016년 1월23일 21시0분 추가**
("위의 계산식에서 오타가 발생했습니다. 아래글이 맞습니다 이후 글에서도 정정해야 하지만 그냥 놓겠습니다....") .
암튼 1항성일이 23.934469594 시간이고, x 3600(초)를 하면 86164.09053초 이제 이값을 항성시 구동용 펄스의
기본이 되는군요.